Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
3 mois sans nouvelles, aïe !
21 janvier 2013
C’est la date limite pour rendre les projets (merci le forum de planète-sciences) qui nous a sorti de notre torpeur. On s’est quitté il y a 3 mois et la conception du robot n’avait pas beaucoup avancé.
Depuis, il ne s’est rien passé. Enfin rien du coté du robot. Du coup, on oublie pour l’instant les mécanismes sophistiqués, on revoie notre stratégie et même nos principes et on repart sur une nouvelle base.
C’est un mélange de plusieurs réflexions qui trainaient :
- Et si on concevait un seul robot pour en construire deux ?
- Que nous apporte l’utilisation du gyroscope ?
Tout ça nous a amené à l’idée suivante.
Et si on faisait un robot avec ça :

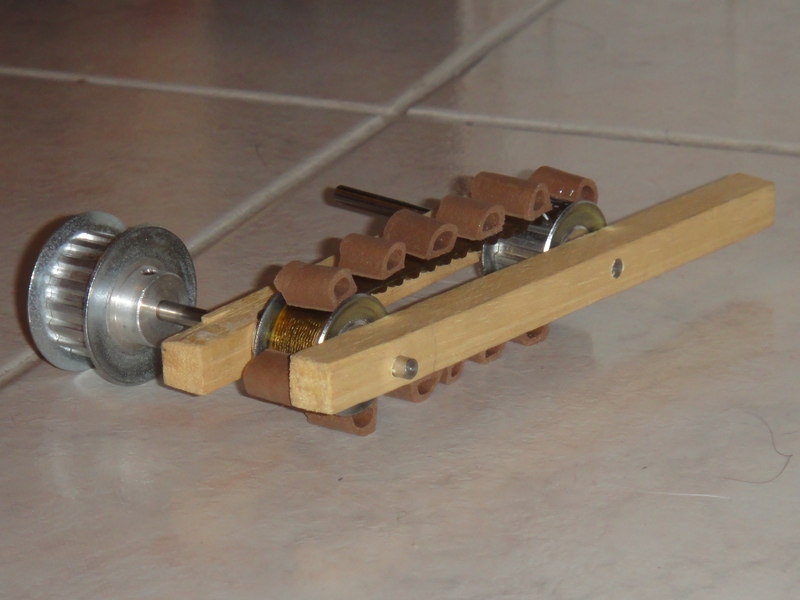
Base roulante 2013
Oui, il faut une petite base roulante pour qu’elle convienne aux deux robots. Grâce au gyroscope, la précision de la mécanique n’a pas besoin d’être extraordinaire. Et on a même idée de mettre un semblant de roue codeuse. Pour ceux qui veulent en savoir un peu plus, voici notre dossier projet :

Nous avons un petit paragraphe pas très élégant pour expliquer au jury qu’on savait à peu près ce qu’on faisait et que oui, on était au courant qu’on était à la bourre.
Mots clés : Conception, Coupe, Projet
Un premier prototype pour monter les verres
27 octobre 2012
Voici notre premier prototype pour lever les verres. Bien qu’il ne soit pas fonctionnel, il nous a permis de valider le concept et de dimensionner un servomoteur.
La suite bientôt si tout se passe bien !
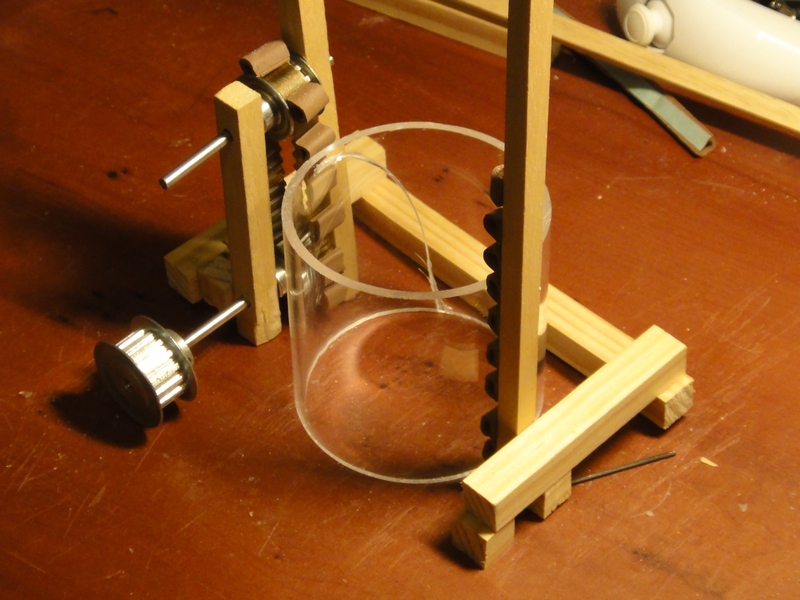
Prototype pour un monte-verre
Tube de plexiglas
17 octobre 2012
Nous avons reçu les tubes de plexiglas de notre vendeur sur un site d’enchères en ligne.
Sur les trois tubes de 50 centimètres que nous avons commandés, l’un est fendu sur les 7 premiers centimètres. Ceci ne nous a pas empêché d’essayer de se servir de la partie fendue pour réaliser un verre. À notre grande surprise, le plexiglas s’est très bien découpé à la scie à métaux, sans exploser.
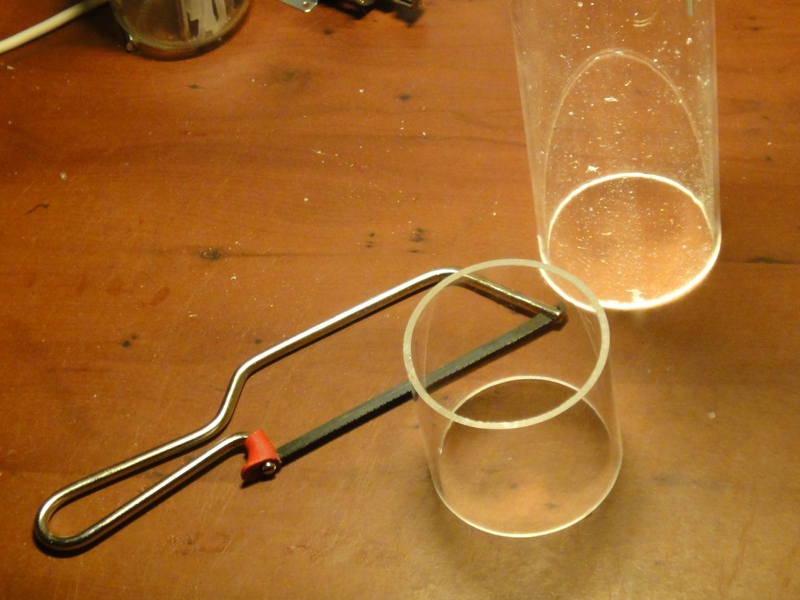
Découpe du plexiglass
On trouve sur internet, notamment sur les sites de certaines équipes, des équipes qui montrent leurs idées, notamment celles pour ramasser les verres. Pour vous tenir au courant, jetez un coup d’œil sur le portail des équipes.
Ben, y’aura pas de ça chez nous !
Quoique... Ça pourrait servir à lever des verres ?
Architecture logicielle et courant farceur.
7 octobre 2012
Voici deux nouveaux articles dans notre rubrique odomètrie.
Le premier décrit notre architecture logicielle pour notre carte moteur et l’attribution de fonctions aux modules matériel du PIC.
Le second décrit les obstacles que nous avons rencontrés lors de notre tentative d’asservir en couple notre moteur.
Mots clés : Conception, Électronique, Programmation
Carte pour le contrôle d’un moteur
1er octobre 2012
Le règlement de la coupe de France de Robotique a été publié et nous avons du travail !
Le règlement propose 5 types d’actions :
- Pousser des cadeaux
- Éteindre des bougies
- Lancer des cerises
- Empiler des verres
- Gonfler des ballons
Cette année, en plus d’actions nombreuses et variées, les robots sont plus petits. Cette contrainte mécanique obligera presque toutes les équipes à renoncer à certaines actions. En ce qui nous concerne, nous abandonnons la manipulation des cerises qu’il faut lancer.
Le petit robot s’occupera des cadeaux et de gonfler les ballons.
Le grand robot s’occupera des bougies et des verres.
Nous avons du travail, alors ne trainons pas. Voici notre carte de contrôle de moteur.
Mots clés : Conception, Coupe, Électronique, Projet
page précédente 1 ... 19 20 21 22 23 24 25 26 27 ... 37 page suivante
Administration du site