Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
PinceMoi et les lingots
22 avril 2012
PinceMoi a profité du week-end pour se développer. Il démarre maintenant sur ordre de la tirette, le bouton de sélection du camp de départ est fonctionnel.
Mais le gros du travail s’est fait sur la carte de propulsion et sa communication avec la carte stratégie :
- Deux capteurs soniques sont fonctionnels ;
- Le robot ralentit puis s’arrête en cas d’obstacle détecté sur les capteurs soniques ou sur les contacteurs ;
- La carte stratégie reçoit l’état de ces capteurs et peut ordonner à la carte de propulsion de les ignorer au besoin.
Ceci nous permet de nous approcher du totem et de lui piquer ses lingots !
Une version en plus haute définition est disponible ici : Ogg - 720p - 22 Mo
Pré-coupe ORiGiNe
15 avril 2012
Ce week-end, nous sommes allés à la Pré-coupe organisée par Origine à Evry. L’organisation, une fois sur place, était impeccable. Nous avons pu faire nos tests sur une table entière : ce qui était bien appréciable.
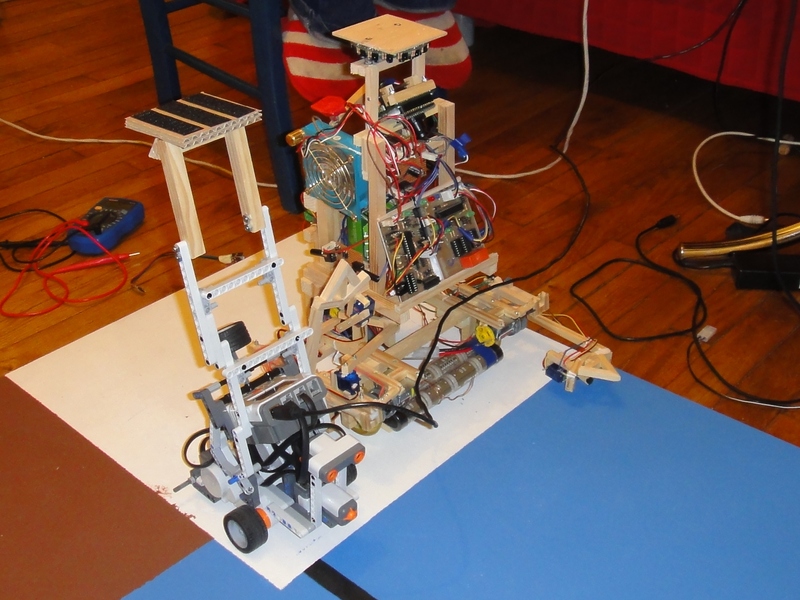
Le robot LEGO est sûr de taper la première bouteille et pour la deuxième, ça sera un coup de chance.
Le robot en bois est prêt à attraper les pièces d’or et de pousser le lingot sur son bateau.
La preuve en image :
Téléchargement : HD 720p (ogg - 18 Mo) | HD 1080p (ogg -18 Mo)
Mots clés : Coupe, Essais, Robot Lego, Vidéo, 2012
PinceMi et PinceMoi
11 avril 2012
Voici en exclusivité notre robot secondaire à coté de son grand frère.
PinceMi et PinceMoi
Pince Mi (notre petit robot) est homologable côté violet !
Une nouvelle vidéo de notre grand robot est disponible ici.
Mots clés : Coupe
Le robot attrape un CD
6 avril 2012
Un pas de plus vers l’homologation ! Sur la vidéo, le robot n’a plus beaucoup de batterie, ce qui peut expliquer un asservissement lent et laborieux.
Par ici la vidéo :
Téléchargement : Ogg - 4,3 Mo | Mp4 - 10 Mo
Notre premier partenaire
5 avril 2012
Nous tenons à remercier Go Tronic, notre principal fournisseur en tout genre (électronique et mécanique) si l’on excepte les baguettes de bois.
Nous apprécions particulièrement leurs connecteurs pour circuits imprimés et leur gaine thermorétractable transparente même si celle-ci est un peu cachée dans le catalogue (code 08859).
Logo GoTronic
Mots clés : Site
page précédente 1 ... 23 24 25 26 27 28 29 30 31 ... 37 page suivante
Administration du site