Présentation de Gousse et Petit pois
28 novembre 2021
Avant propos
Il est assez dur de présenter un robot 6 ans après la compétition, mais c’est pourtant ce que nous allons faire ici. Nous sommes en novembre 2021 et ce robot vient d’être démonté, désassemblé, recyclé...
Sur l’année 2014-2015, nous savions que nous n’aurions pas beaucoup de temps à consacrer au robot. Nous avions repris la base roulante de l’année précédente, essayé de trouver un concept un peu innovant et consacré tous nos efforts là-dessus.
Le déroulement de la coupe se base sur un article que nous n’avons pas publié.
Les robots

Vous avez ici le règlèment, l’action qui rapporte le plus de point consiste à avoir un robot sur un podium accessible par un petit escalier.
L’objectif était d’avoir un robot capable de monter les marches qui permettaient d’accéder au podium. Nous avions une base roulante suffisamment précise pour atteindre les marches, mais incapable de les monter.
De l’autre côté, créer un robot simple qui avance un court moment, capable de monter ces marches ne paraissait pas insurmontable.
Nous avons pris le parti d’avoir ces deux robots, Gousse (le gros robot) et Petit Pois (le petit robot). Au début du match, le Petit pois recule et monte dans Gousse. Gousse se déplace, se positionne face au marches et indique à Petit pois qu’il peut partir à l’assaut des marche.
Gousse reprend notre base roulante de l’an dernier, avec très peu de modification sur le code de bas niveau (localisation, déplacement, gestion des servomoteur, gestion des capteurs ultrasons)...

Gousse - presque fini !
Petit pois est fait en Lego, reprenant sans la moindre honte, la conception du robot Lego Mindstorm le plus simple présenté dans la notice. Deux modifications :
- Le moteur à l’avant pour soulever l’avant et franchir la marche
- Le bouton d’arrêt d’urgence, qui quitte le programme Lego en cours.
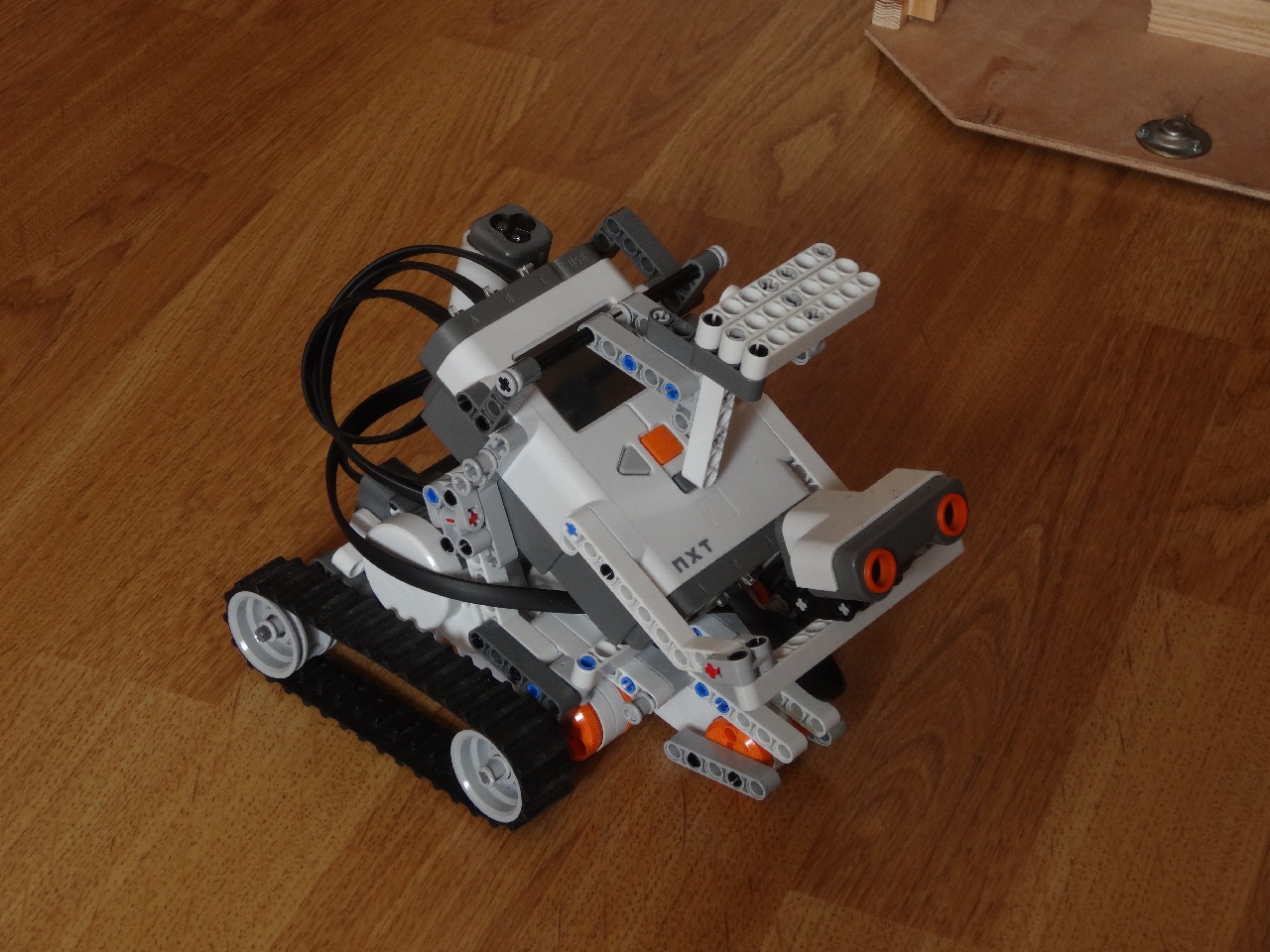
Petit pois
Enfin, voici Gousse qui a embarqué Petit pois
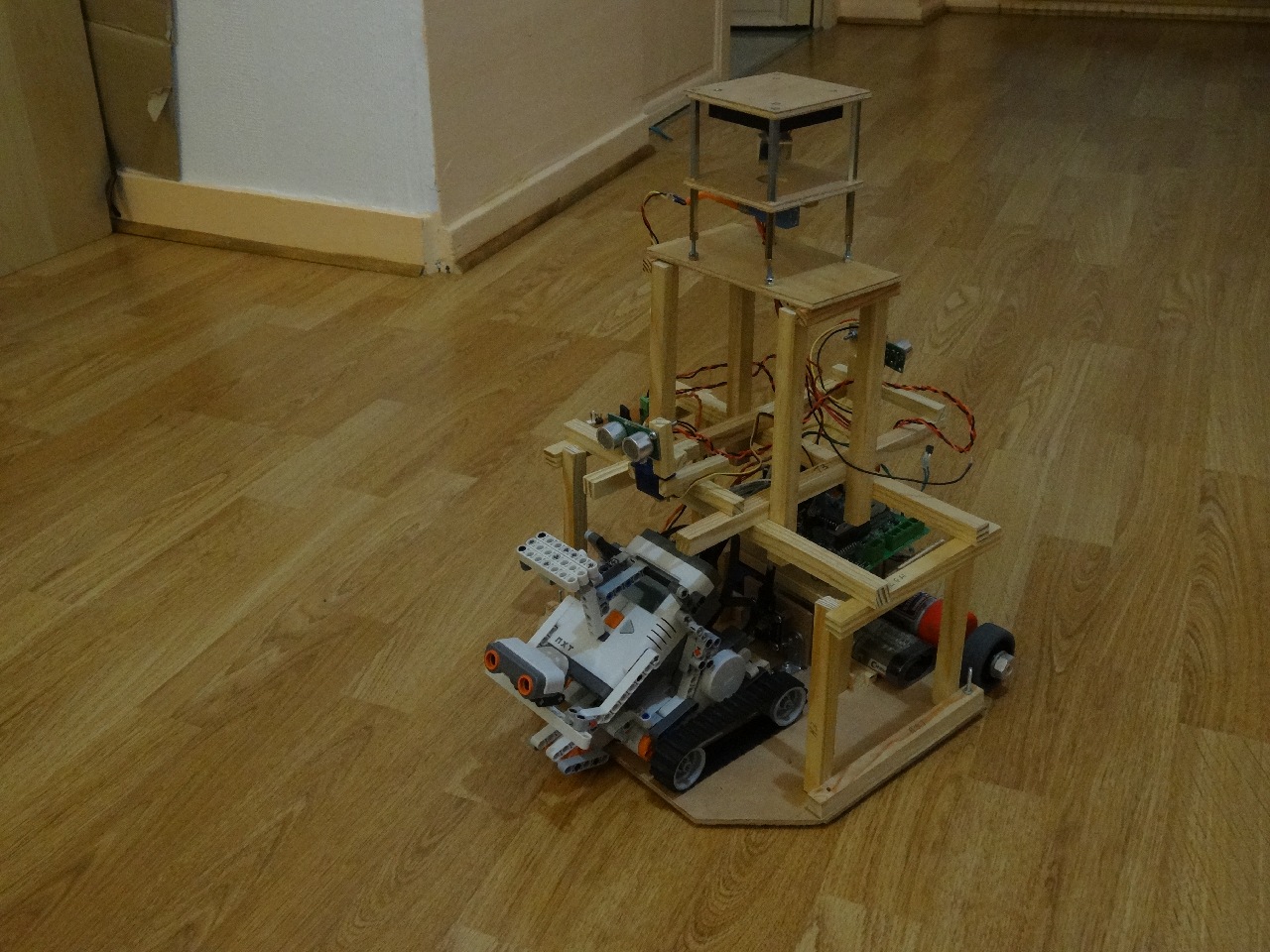
Petit pois dans Gousse
Les matchs
Ce n’est que devant les faits qu’il n’est possible de juger une idée !
Arrivés vers 13h, nous franchissons la porte d’entrée vers 16h30 et nous homologuons nos deux robot à 17h32.
L’action était simple, nous avons eux des problèmes sur 2 des 5 matchs. Et quand les matchs se passent bien, les 30 dernières secondes sont vraiment inintéressantes.
Match 1
Nos deux robots ont besoin de communiquer. Ils ne s’échangent qu’un seul message dans le match, ce message indique au petit robot qu’il est face aux marches et qu’il peut quitter le gros robot. Pour ce premier match, ce sont des DELs qui envoient un signal au petit robot. Suspectant que les spots de la coupe pourraient perturber le capteur, nous profitons des 3 minutes de préparation pour faire un essai. Le petit robot ne sort pas du grand, nous décidons de ne pas poser le petit robot sur la table pour ce match.
Le robot recouvre 3 marches avec deux tapis (6 points) et va abattre un clap (5 points). Pour nos adversaires, le match est catastrophique, la tirette de le petit robot (qui se trouve devant leur gros robot) se casse. Laissant le petit robot inactif et le gros coincé derrière le petit.
C’est une victoire, pas très glorieuse, mais avec nos 16 points (11 + 5 point de participation) nous nous classons à la 35e place.
A la fin du match, nous modifions notre système, Gousse et Petit pois communiquent avec un interrupteur sur Petit pois qui est actionné par un servomoteur de Gousse.
Match 2
Nous rencontrons Cubot, une équipe qui maintient, comme nous, un portail des équipes. C’est à notre adversaire de ne pas poser son petit robot au début du match. Nos robots se comporte bien, le petit grimpe ses marches (15 points), le gros dépose les deux tapis (4 points) et va abattre son clap (5 points). L’un des tapis recouvre les marches adverses, mais Cubot n’avait pas besoin de ça pour remporter haut la main la rencontre, avec un spot complet de trois pieds (15 points), un pied de 2 étages (4 points), un verre de pop-corn (4 points) et 2 clap (10 points)
Match 3
Nous rencontrons Supeirb’hot, une équipe avec un tout petit robot aux grosses roues crantées. De note coté le match se passe bien :
- 15 points pour la montée des marches
- 6 points pour les tapis
- 5 points pour le clap
Notre robot est de bonne humeur et offre deux points à l’équipe adverse en faisant déborder un de nos tapis sur leurs marches.
C’est une victoire pour Poivron, 31 points contre 7.
Match 4
Troisième match de la journée, nous affrontons CRLG. L’attente avant le match a été longue, en fin d’après midi les robots arrivent enfin sur la table de match mais sans leurs tirettes. Nous profitons des trois minutes de préparation pour aller chercher les tirettes. Dans la précipitation, nous oublions de charger les tapis :
- 15 points pour la montée de marches
- 5 points pour le clap
Et c’est tout. En face, une équipe qui maîtrise son sujet et qui marque 50 points grâce à son petit robot qui grimpe les marches et recouvre 7 des 8 marches avec ses tapis.
25 point pour Poivron, 50 pour CRLG.
Match 5
Pour terminer en beauté, nous ajoutons deux bouts de code. L’un pour pousser deux spots vers la zone de dépose, l’autre pour activer le clap côté adverse. Nous affrontons Gmp3, des voisins de stand. Le match se déroule bien, l’un des tapis reste accroché au bras du robot à cause d’un bout de scotch (qui devait se trouver sur le tapis au début du match) et nous n’activerons pas le second clap :
- 15 points pour la montée de marches
- 4 points pour les tapis (2 marches + marche pour l’adversaire)
- 5 points pour le clap
- 4 pour pour les deux pieds de spot dans la zone de dépose.
Notre adversaire ramène deux pieds et un gobelet de pop-corn dans sa zone de départ et ferme deux claps. Leur robot traversera le terrain pour déposer un gobelet dans les zones de dépose de note côté, en vain. Leur gobelet se renverse.
Une victoire de 33 points contre 25, mais surtout des points marqués en variant les actions.
Le classement
Malgré ces performance en demi teinte, nous nous classons 37e au classement général, sur 178 équipes inscrites.
Commentaires
Il n'y a pas de commentairesAjouter un commentaire
Administration du site