Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Règlement 2023 et notre programme
16 septembre 2022
Le brouillon du règlement de la coupe est disponible, sur le site de la coupe de France de robotique. Cela fait donc une semaine que nous réfléchissons activement au règlement.
C’est un règlement à l’opposée de celui de l’an dernier, avec une table presque sans obstacle qui incite à avoir des robots qui se déplace bien, voire très bien sur le terrain !
Alors, en attendant la version finale du règlement - la FAQ peut vous indiquer dans quel sens évolue le règlement - nous ébauchons nos robots.
Cette année nous sommes très tentés d’avoir deux robots. Le premier sera basé sur notre architecture de 2014 et sera chargé de marquer les points avec les gâteaux. Le second robot sera bien différent du premier et s’occupera des cerises. Voici ce que nous avons en tête avec les principales étapes du projet.
Robot des gâteaux
Basé sur le robot historique, nous réutiliserons les roues, les moteurs, le gyroscope et notre magnifique carte électronique maison. Il embarquera les 10 cerises du départ, devra pousser et tirer les gâteaux dans les assiettes et leur déposer une cerise dessus. Voici notre programme (pas forcément dans l’ordre) :
- Programmation : gérer les accélérations et décélération au niveau des trajectoires
- Programmation : Arrêt de l’asservissement en cas d’erreur trop grande
- Mécanique : actionneur pour prendre une cerise du réservoir du robot et la déposer sur un gâteau
- Mécanique : refaire le châssis, diminuer le périmètre non-déployé
- Programmation - optionnel : Gérer la stratégie haut niveau avec le Raspberry Pi
Robot des cerises
Nous partons de zéro pour ce robot. Pour la localisation, nous tentons de rester sur l’architecture qui nous a si bien réussi : des codeurs sur les moteurs. Pour le reste, l’objectif est de changer un peu des technologies utilisées depuis 2014 sur nos robots. Ce sera donc un robot holonome, d’un diamètre modeste (nous visons 25cm). Le cœur de l’électronique sera un Raspberry Pi Pico et pour le pilotage des moteurs, nous hésitons entre des LMD18200 ou des modules de type Pololu. Sur ce robot, notre programme est très chargé :
- Mécanique : base roulante holonome
- Mécanique : intégration de l’électronique
- Mécanique : intégration de la batterie
- Électronique : prototypage sur plaque de test pour valider les capteurs/actionneurs
- Électronique : conception de la carte
- Programmation : lecture du gyroscope à partir du RPI Pico
- Programmation : lecture des capteurs de couleur à partir du RPI Pico
- Programmation : lecture des codeurs à partir du RPI Pico
- Programmation : portage du code des servomoteurs (ou utilisation des PWM ?)
- Programmation : portage des codes de déplacement sur RPI Pico (asservissement, construction des trajectoires, accélération et décélération, arrêt sur erreur trop grande)
- Divers : système de préhension et de dépose des cerises
- Divers : système d’évitement.
En gros
Un programme bien (trop ?) chargé. Alors nous essayons de ne pas trop traîner, nous avançons bien côté shopping. Nous espérons avoir fini de commander les composants nécessaire à la nouvelle roulante ce week-end. Ensuite, nous nous focaliserons sur le RPI Pico...
Mots clés : Conception, Coupe, Odométrie, Robot holonome, 2023
Mesure des résistances et avancement général
17 mai 2022
Nous sommes le 17 mai 2022 qui se situe exactement en "J-pas beaucoup" et "J-pas assez".
Mise à jour de notre Todo List :
-
Affichage du score-
Fixer l’écran, le Raspberry Pi et le nouveau bouton On/Off
-
-
Réaliser la cale pour positionner le robot en début de match -
Panneau de 70x100 mm à installer sur le robot - Détection des résistances :
-
Conception et réalisation mécanique -
Adaptation du câblage -
Code du module - Intégration dans la stratégie
-
- Stratégie alternative en cas de robot bloqué
- Contrôler et adapter la position du robot lors de la dépose de la réplique, pour garantir qu’elle soit à 100% sur le socle à chaque fois.
Senseur pour résistance
La zone où mesurer la résistance n’est pas très grande, elle se situe sur un plan incliné et comme nous souhaitons être robuste aux variations de positionnement de notre robot, ceci nous pose des soucis.
Nous avons conçus une mécanique pas si simple, mais qui ne nécessite qu’une seul actionneur. Les essais montrerons que nous manquions d’un degré de liberté, ce qui nous amènera à installer un système à ressorts en plus de l’élastique. Voici l’idée, sur l’image ci-dessous, seul le bras bleu est actionné par le servomoteur :
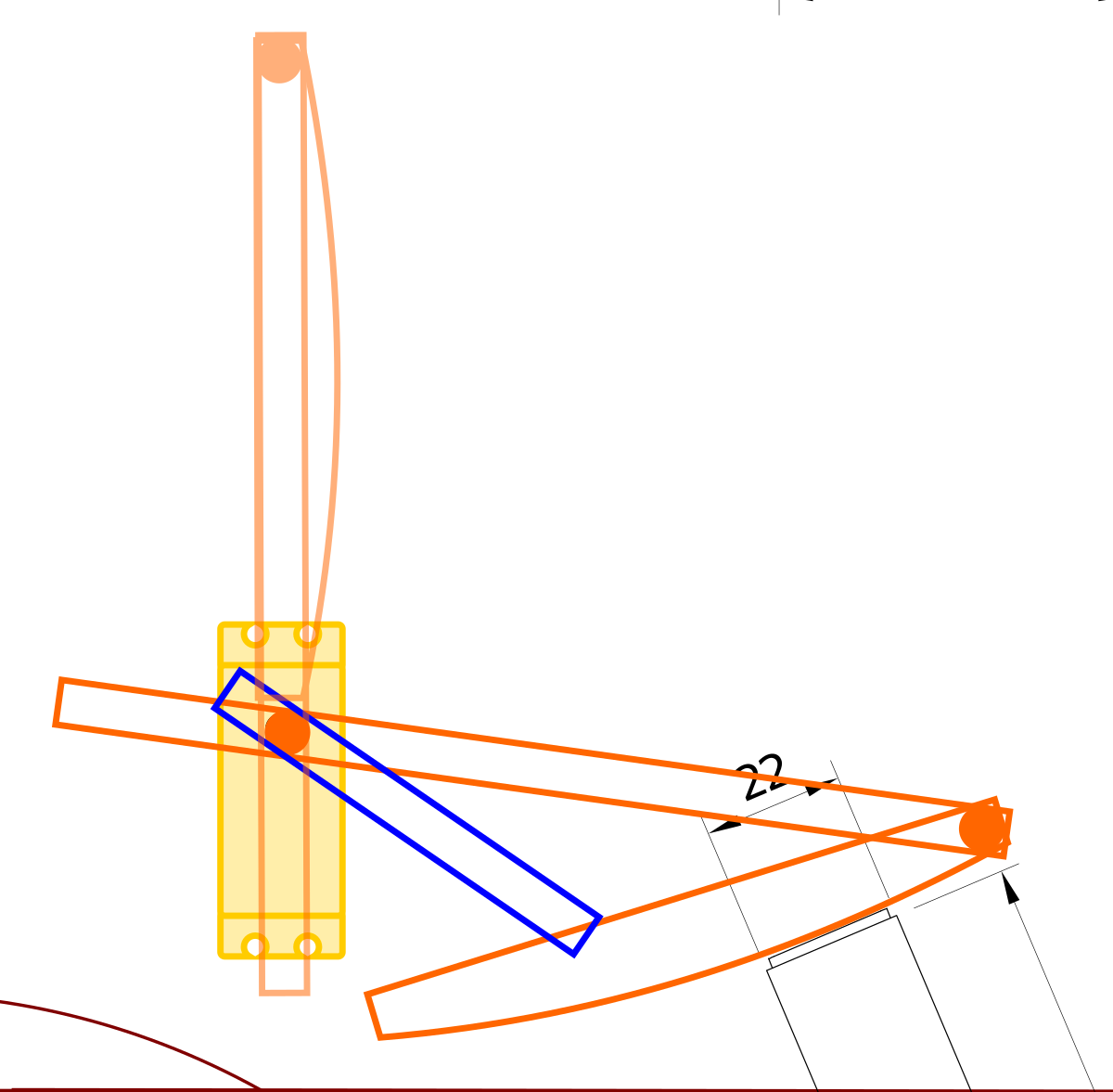
Principe du "Senseur R"
Tout commence avec un profilé qui ressemble à une nervure d’aile d’avion : il nous faut une belle courbe :

Comme une aile d’avion
Ensuite nous montons ceci sur un mat, avec un axe et nous rajoutons le contact électrique. Ne trouvez-vous pas que ce fils de cuivre a un certain charme sur le bois ?
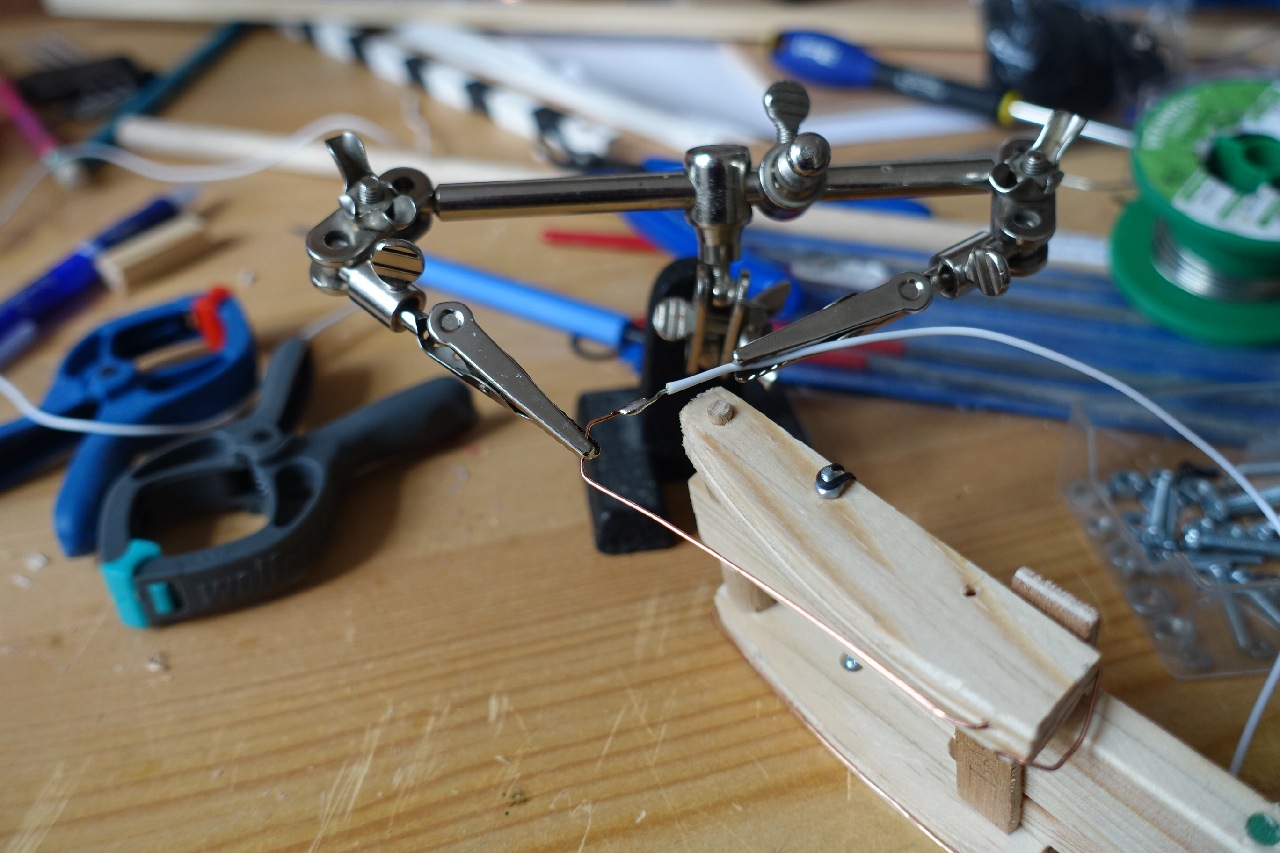
Le cuivre et le bois
Ce qui, une fois fini et câblé ressemble à ceci :
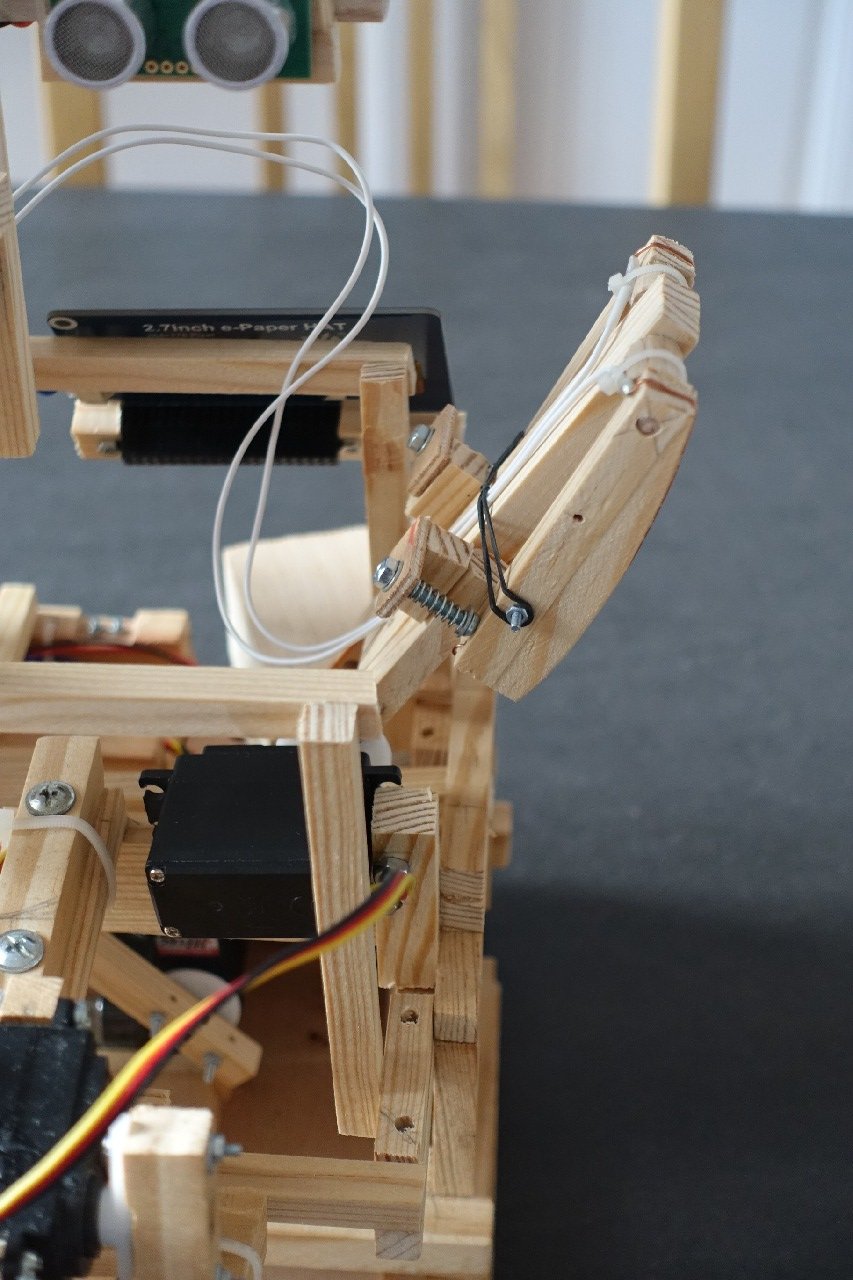
Senseur R monté
Nous pourrions dire qu’afin d’avoir le système le plus robuste possible, nous avons un élément de test le plus moche possible, mais ce ne serait pas 100% exact.
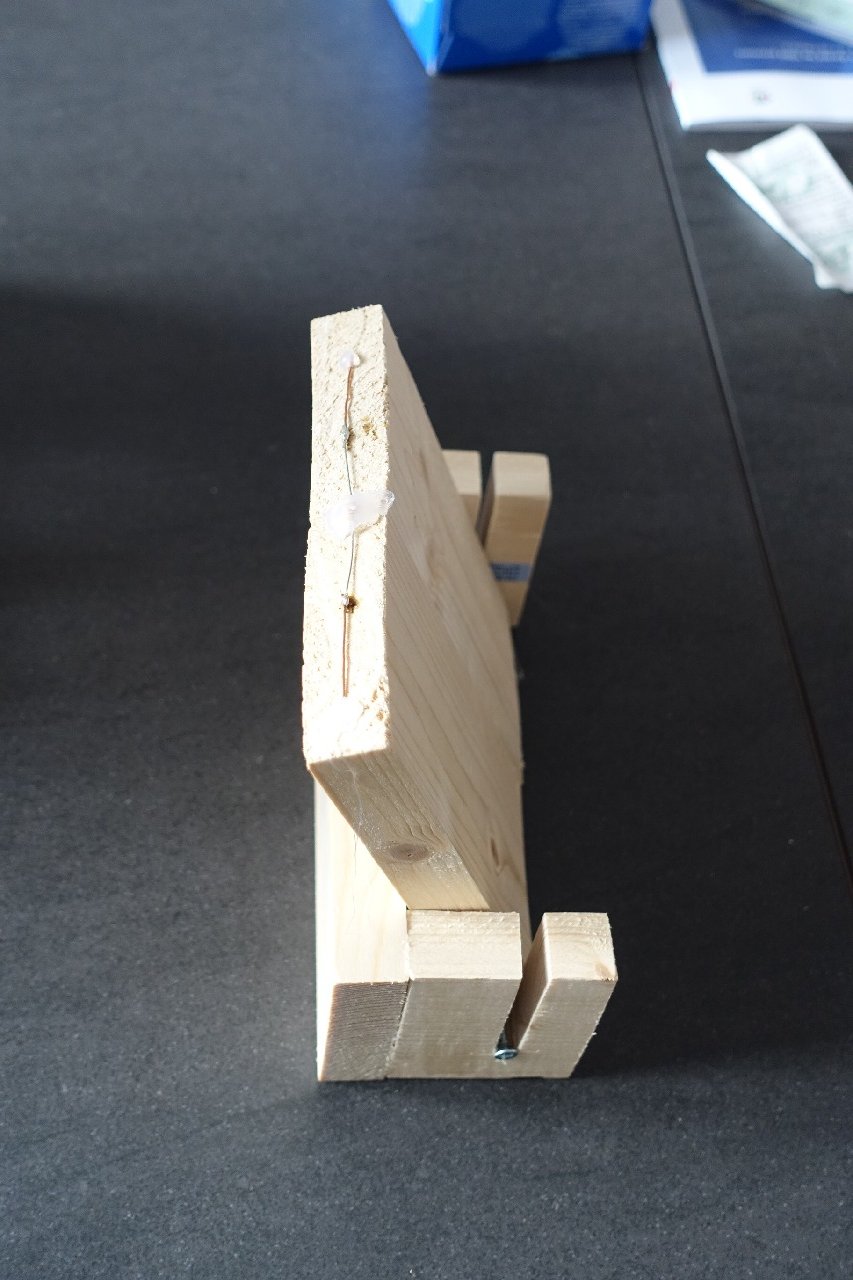
Élément de test - carré de fouille
Et pour conclure, une courte vidéo du système en action :
La vidéo est disponible en 720p ici (mp4 - 5,6 Mo).
Mots clés : Conception, Coupe, Essais, Vidéo, Eurobot 2022, Photo
3 mois sans nouvelles, aïe !
21 janvier 2013
C’est la date limite pour rendre les projets (merci le forum de planète-sciences) qui nous a sorti de notre torpeur. On s’est quitté il y a 3 mois et la conception du robot n’avait pas beaucoup avancé.
Depuis, il ne s’est rien passé. Enfin rien du coté du robot. Du coup, on oublie pour l’instant les mécanismes sophistiqués, on revoie notre stratégie et même nos principes et on repart sur une nouvelle base.
C’est un mélange de plusieurs réflexions qui trainaient :
- Et si on concevait un seul robot pour en construire deux ?
- Que nous apporte l’utilisation du gyroscope ?
Tout ça nous a amené à l’idée suivante.
Et si on faisait un robot avec ça :

Base roulante 2013
Oui, il faut une petite base roulante pour qu’elle convienne aux deux robots. Grâce au gyroscope, la précision de la mécanique n’a pas besoin d’être extraordinaire. Et on a même idée de mettre un semblant de roue codeuse. Pour ceux qui veulent en savoir un peu plus, voici notre dossier projet :

Nous avons un petit paragraphe pas très élégant pour expliquer au jury qu’on savait à peu près ce qu’on faisait et que oui, on était au courant qu’on était à la bourre.
Mots clés : Conception, Coupe, Projet
Architecture logicielle et courant farceur.
7 octobre 2012
Voici deux nouveaux articles dans notre rubrique odomètrie.
Le premier décrit notre architecture logicielle pour notre carte moteur et l’attribution de fonctions aux modules matériel du PIC.
Le second décrit les obstacles que nous avons rencontrés lors de notre tentative d’asservir en couple notre moteur.
Mots clés : Conception, Électronique, Programmation
Carte pour le contrôle d’un moteur
1er octobre 2012
Le règlement de la coupe de France de Robotique a été publié et nous avons du travail !
Le règlement propose 5 types d’actions :
- Pousser des cadeaux
- Éteindre des bougies
- Lancer des cerises
- Empiler des verres
- Gonfler des ballons
Cette année, en plus d’actions nombreuses et variées, les robots sont plus petits. Cette contrainte mécanique obligera presque toutes les équipes à renoncer à certaines actions. En ce qui nous concerne, nous abandonnons la manipulation des cerises qu’il faut lancer.
Le petit robot s’occupera des cadeaux et de gonfler les ballons.
Le grand robot s’occupera des bougies et des verres.
Nous avons du travail, alors ne trainons pas. Voici notre carte de contrôle de moteur.
Mots clés : Conception, Coupe, Électronique, Projet
Administration du site