Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Une pince pour les plantes : le grappin !
12 novembre 2023
Pour attraper les plantes, il faut une pince, ou un dispositif similaire. Nous choisissons d’utiliser une pince à 3 doigts, parce que cela semble à la fois joli et efficace.
La voici en images :

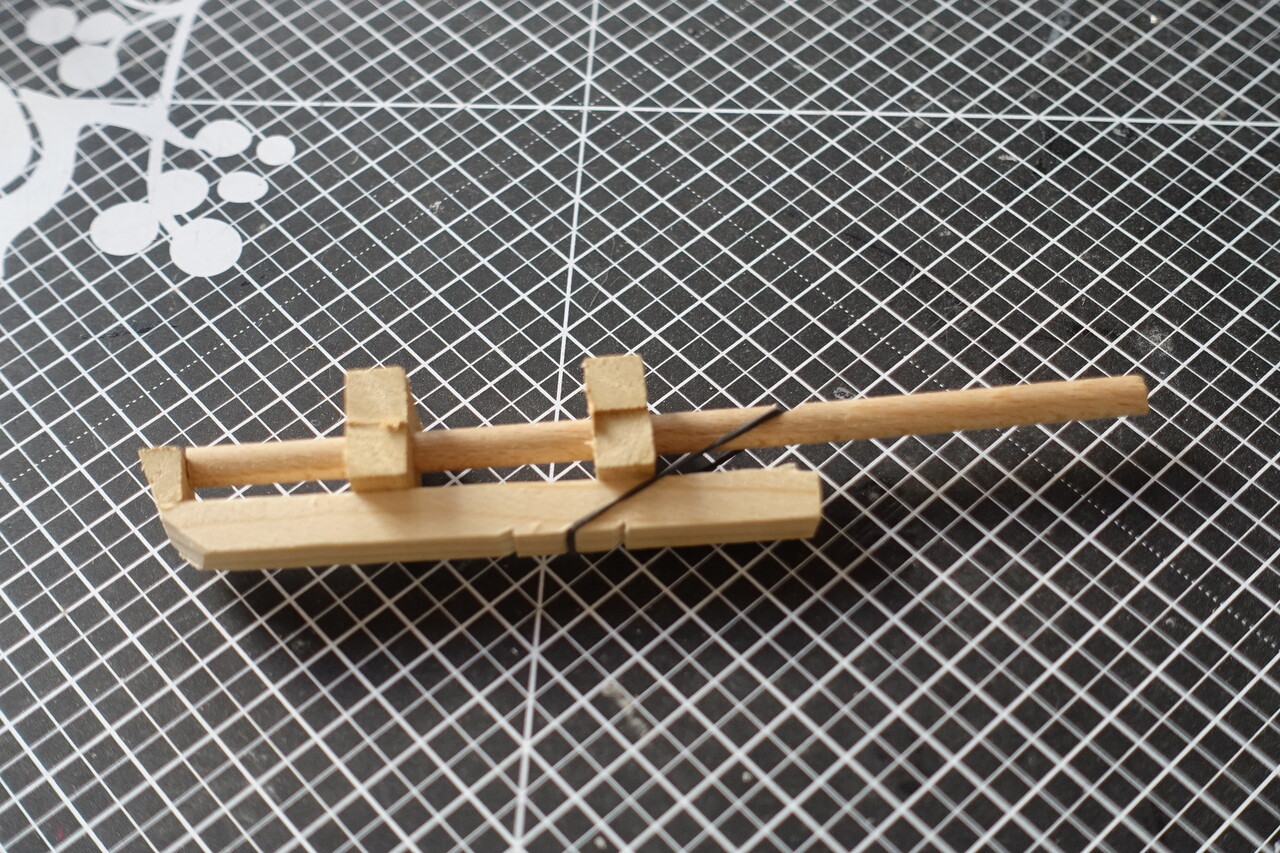
Les doigts découpés à la scie
Et une fois montés :

Doigts assemblés
Ensuite, nous ajoutons le mécanisme pour piloter les doigts et le servomoteur pour actionner le mécanisme.
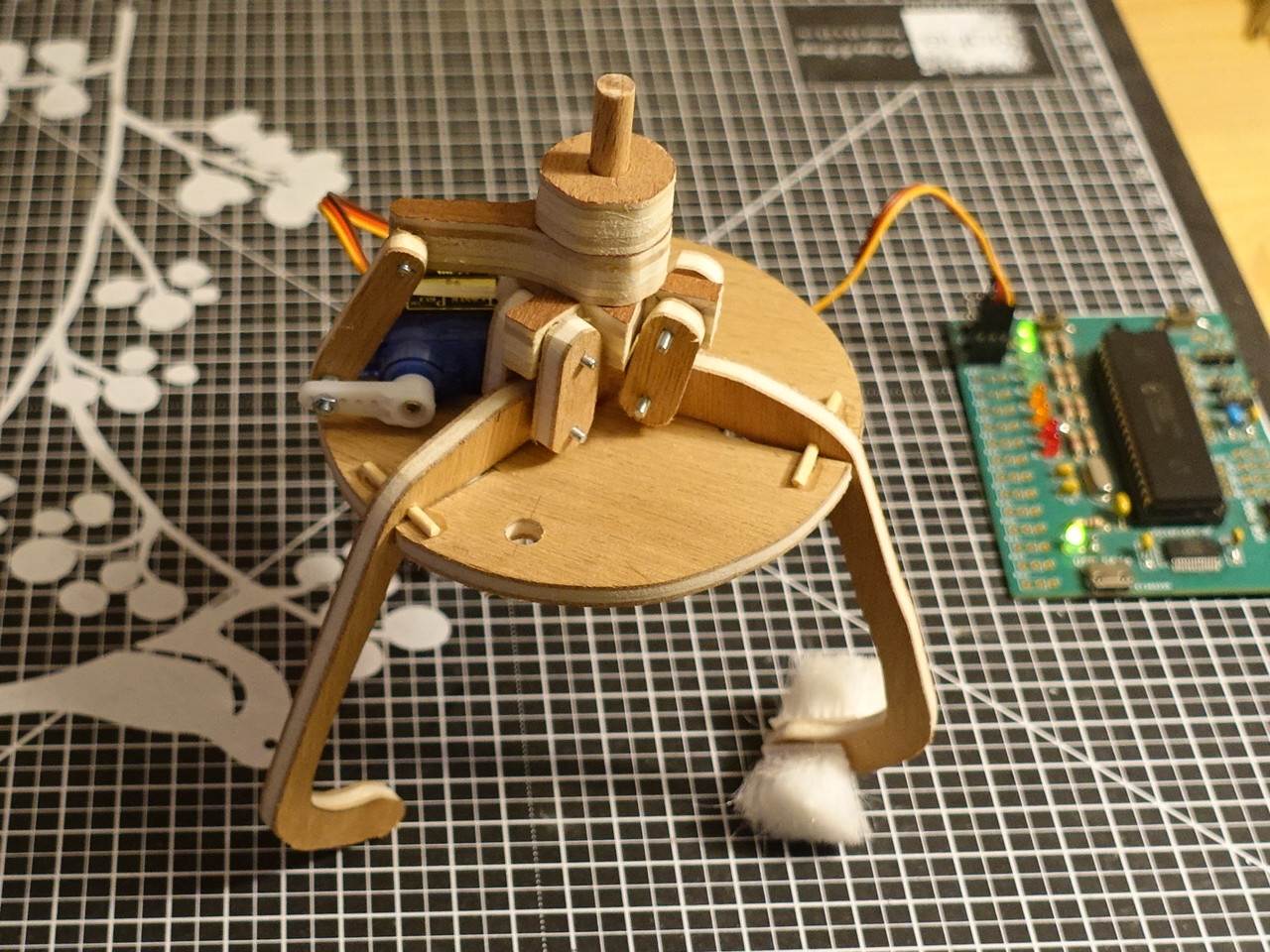
Le grappin !
L’ensemble en action à vide :
L’ensemble avec une plante :
Y’a plus qu’à :
- réaliser l’ascenseur pour monter la plante
- réaliser l’axe latéral pour mettre la plante dans un pot.
Bref, il reste du travail.
Mots clés : Conception, Mécanique, Photo, Vidéo
La rentrée 2023 - club robotique et plantes
1er octobre 2023
Que s’est-il passé lors de cette rentrée 2023 ? Comment avons nous pu rester silencieux si longtemps après la publication du règlement de la coupe de France de robotique ? Tous ces mystères vont vous être révélés ! Mais avant cela, un peu de contexte.
Poivron Robotique est, depuis de longues années, une équipe familiale. Nos deux dernières participations nous ont montré que nous savions réaliser des robots, au moins pour notre compétition fétiche. Sûrs de nos acquis, nous tentons de grossir et de transmettre.
Club robotique de Riom
C’est pourquoi nous avons fondé le club robotique de Riom. La rentrée fut l’occasion de remettre nos deux robots (Capsicum et Hexa) en marche et de tenir un stand au forum des associations de la ville. Bien qu’ayant déjà été (un peu) engagés dans des associations, le démarrage ne fut pas de tout repos, entre la crainte de n’avoir personne, d’avoir trop de membres, de ne pas avoir de local, de ne pas avoir assez de budget... Bref, après avoir dépensé pas mal d’énergie - et peut-être avec un peu de chance - nous trouvons notre public et la mairie nous met à disposition une salle sur un créneau horaire confortable.
Nous partagerons prochainement le lien vers le site de l’association, mais pour l’instant, il faut le créer !
Les plantes
Le règlement de la Coupe de France de Robotique 2024 fut présenté le 9 septembre 2023, sous forme de brouillon. Les points des actions ne sont pas définis et certains détails pourraient changer. Mais en gros, il s’agit d’attraper des plantes, de les mettre dans des pots pour mettre l’ensemble soit dans une jardinière de l’autre côté de la bordure, soit dans une zone de dépose.

Plante et pot
Ce règlement présente deux défis :
- les plantes ne sont pas à des positions fixes, les saisir va demander une bonne détection ou un peu d’astuce ;
- la mise en pot ou la dépose dans les jardinières nécessite un actionneur mobile sur 2 axes. Bref, une mécanique un peu travaillée.
Mais les éléments de jeux légers et nombreux devraient nous inciter à réaliser de beaux mécanismes.
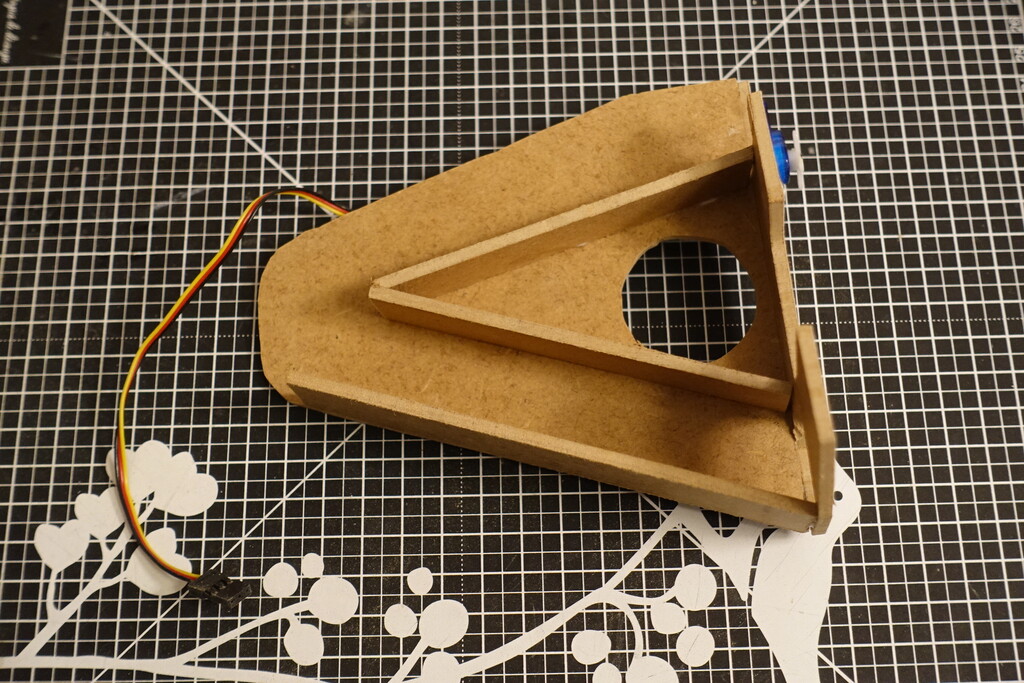
Nous cherchons les premiers mécanisme pour manipuler ces éléments de jeux, mais nous n’avons rien trouvé de satisfaisant pour l’instant. Notre première tentative d’actionneur se présente ainsi :
Doigt attrape pot
Cependant le poids du pot garni avec une plante est trop important pour les élastiques utilisés. Pour attraper seulement les plantes, les feuillages de celles-ci peuvent empêcher l’actionneur de se positionner correctement sur le pot. Sinon, nous aimions bien le principe :
Mots clés : 2024, Photo, Conception, Coupe
CARAR Junior 2023 - vers un robot fonctionnel
19 mars 2023
Presque un mois sans faire de point d’avancement, alors où en sommes nous ?
L’objectif de ces derniers jours était d’avoir un robot fonctionnel pour la coupe Auvergne-Rhône-Alpes junior. Même si nous avons passé un très bon moment là-bas, d’un point de vu du robot, ce n’est pas une réussite à 100%, le robot n’a pas pu rouler sur les tables de jeux, il n’était pas prêt.
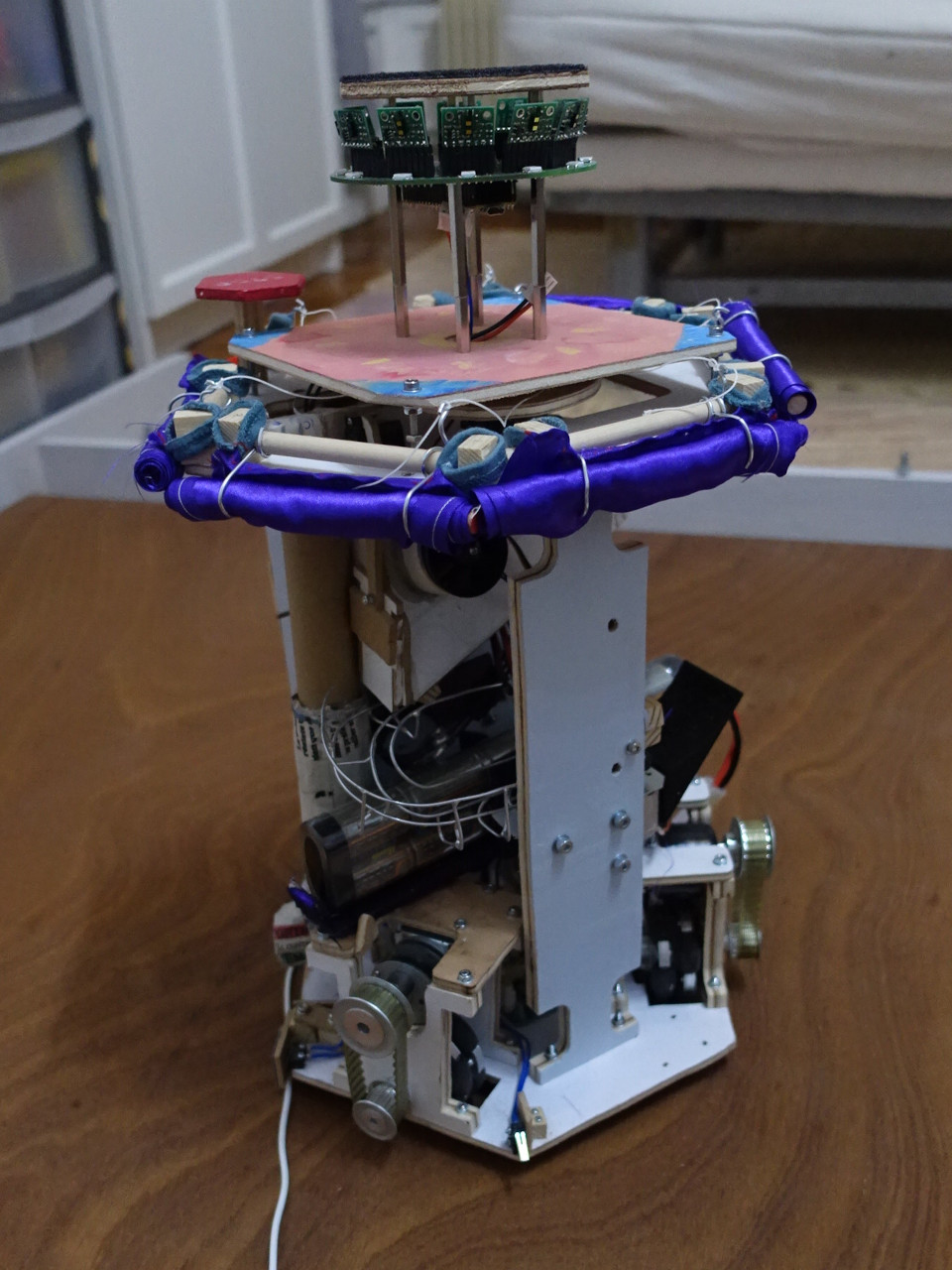
Cependant, nous avons bien avancé sur de nombreux de points. Principalement, le propulseur a été prototypé, testé, amélioré, re-testé puis intégré. Il reste un problème à régler avec les perturbations électromagnétiques, mais envelopper les moteurs dans du papier d’aluminium devrait régler le problème.

Guide du propulseur

Moteurs du propulseur
La structure a aussi bien avancé avec la fixation du toit, de l’arrêt d’urgence, de la batterie et de la tirette.
Prochain rendez-vous le 1er avril 2023, pour la coupe Auvergne Rhône-Alpes à l’INSA de Lyon !
Avancement
Du côté de nos tâches :
- Reprendre les tests avec la turbine
-
Aspiration : intégration + tests fonctionnels :fait ! -
Soufflage : abandon, nous allons tenter de propulser les cerises avec des roues. - Propulseur :
-
Prototype :fait ! -
Intégration :fait ! - Tests fonctionnels : 90% - des problèmes de perturbation électromagnétiques
-
- Rampe entre l’aspiration et le propulseur
- Certaines balles tombent, une rembarde à rajouter
-
- Longer les bordures
-
Accostage :fait - Translation en longeant : à faire
-
- Transformer la base roulante en robot :
-
Installer le toit: fait ! - Installer le mat balise
-
Installer le bouton d’arrêt d’urgence: fait ! -
Installer la tirette: fait ! -
Installer la batterie: fait !
-
- Améliorer la détection de l’adversaire
-
Carte de détection fonctionnelle - Tester la perturbation par un capteur en face : à faire
-
- Supervision
- Mesurer la tension de la batterie et détecter une batterie faible
- Stratégie
- Intégrer la détection de l’adversaire dans la stratégie
Contacteurs et détection de l’adversaire
23 février 2023
Inscription à la Coupe de France
Cette année, nous participons à la coupe de France de Robotique dans la catégorie "Legends" nouvellement créée. Une des conditions est de fournir un projet scientifique et un plan de communication. Voici le nôtre.
{kind=link}
Aspiration des balles
Le dernier prototype nous avait donné satisfaction, voici la vidéo.
Aspiration des balles avec le prototype (1 Mo).
Voici quelques photos de la construction de la version finale. Nous l’avons bien montée une fois sur le robot mais démontée presque aussi tôt pour s’occuper des contacteurs.
Aspiration cerises : démontée

Aspiration cerises : vue de face
Une autre raison pour laquelle nous avons démonté le système, c’est que lors de nos essais la turbine était maintenue à la main et que nous l’avons bousillée. Attention, les pâles de turbines sont vraiment dangereuses pour les yeux !

Turbine HS
Nous avons reçu les nouvelles turbines, mais nous ne les avons pas encore installées.
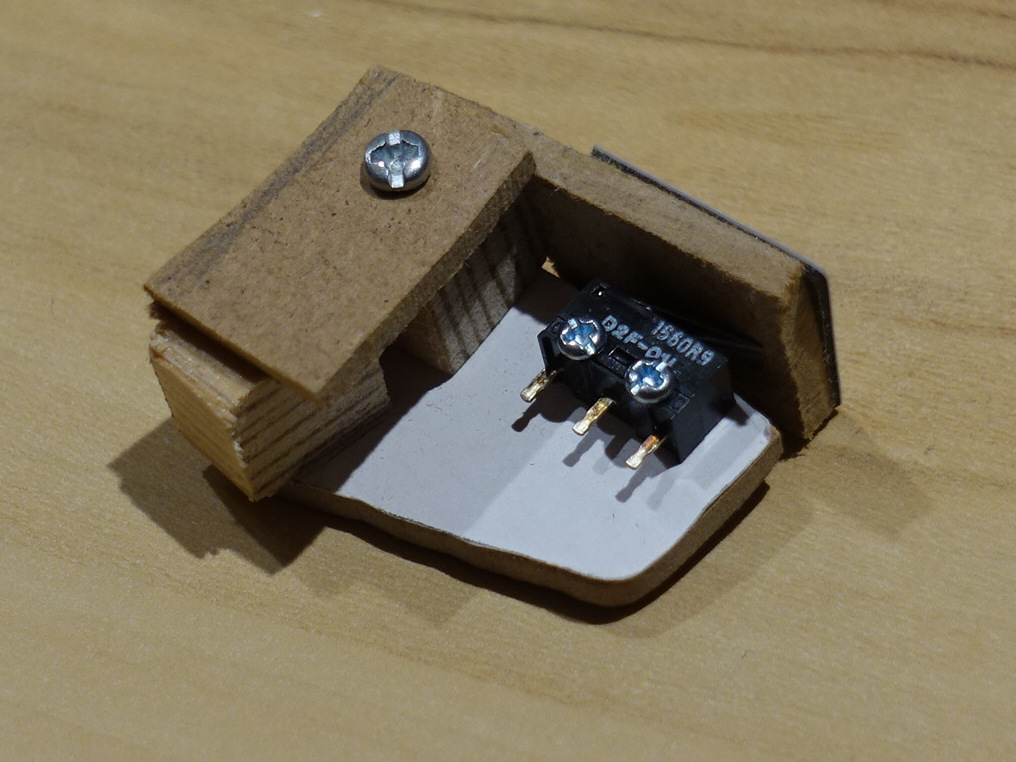
Installation des contacteurs
Les contraintes de place sont assez fortes au niveau des contacteurs. Surtout que ceux-ci doivent être protégés car nous comptons sur eux pour longer des murs. Nous avons finalement un modèle qui nous satisfait. Voici le prototype :
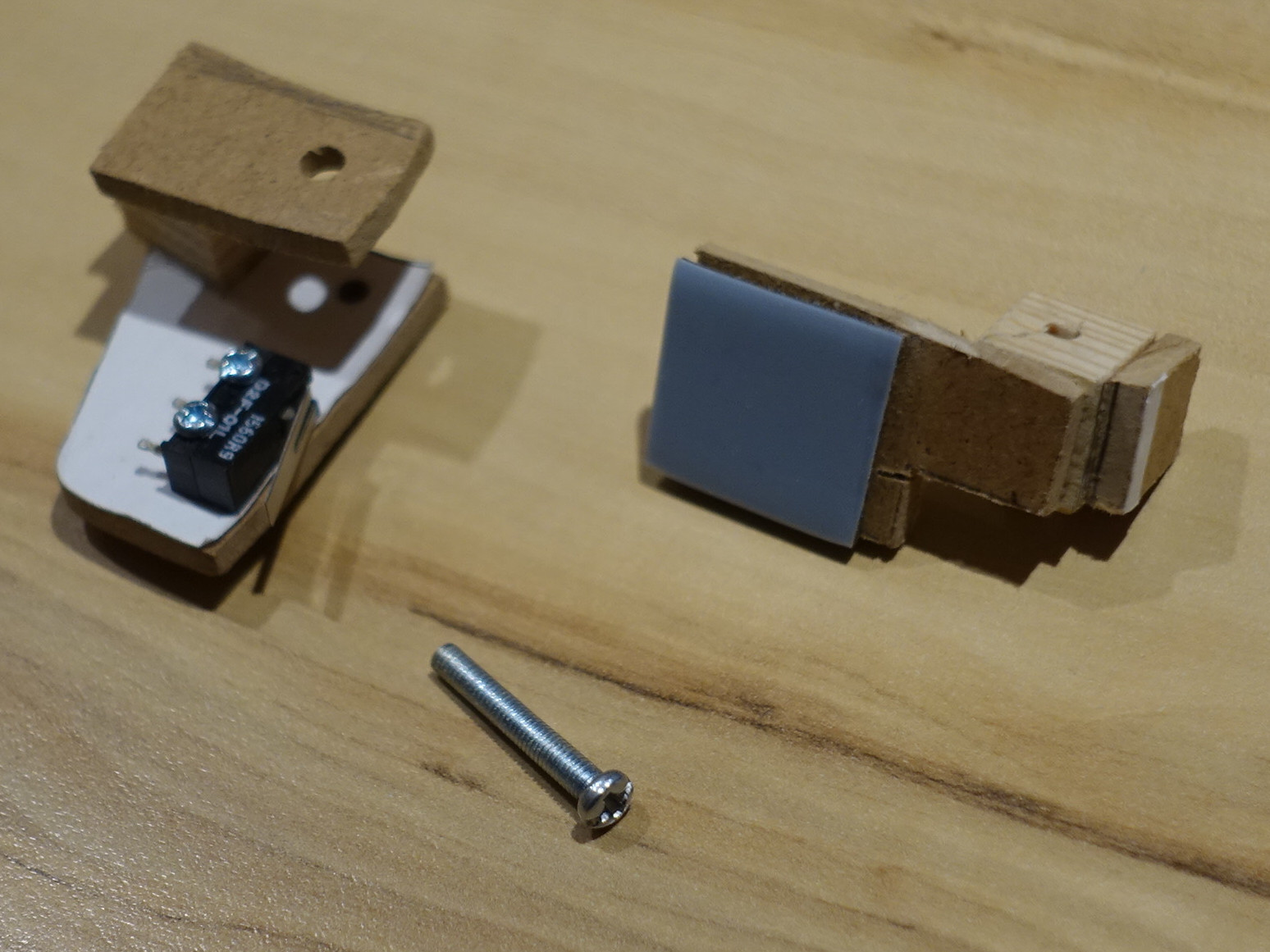
Contacteur désassemblé
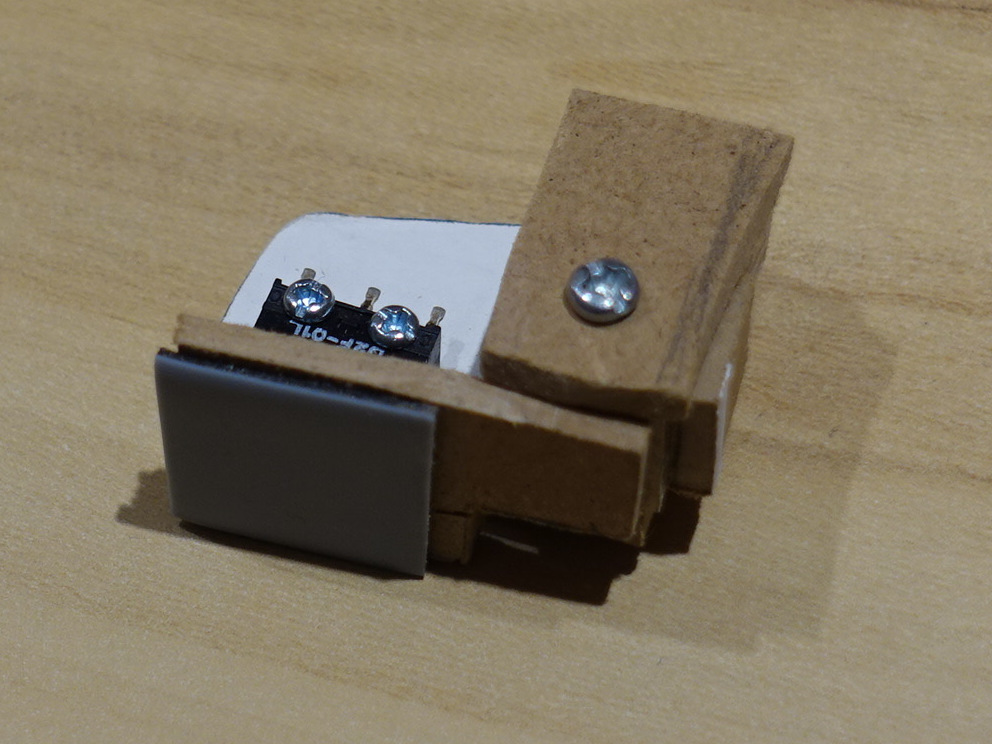
Contacteur assemblé
Surface en PTFE pour les frottements
L’intégration nous a quand même demandé un peu de temps. Mais les contacteurs sont maintenant câblés et raccordés à la carte électronique.

Contacteur "fin de course"

Contacteurs pour longer les murs
Détection de l’adversaire
Nous avons fini la conception de nos cartes, commandé et reçu nos cartes de détection de l’adversaire.

Nous les avons aussi partiellement soudées. Nous avons commandé les mauvaises référence de LED, nous attendons la nouvelle commande. Nous n’avons pas encore soudé tous les capteurs. Nous attendons de valider un minimum le code avant de tous les souder.
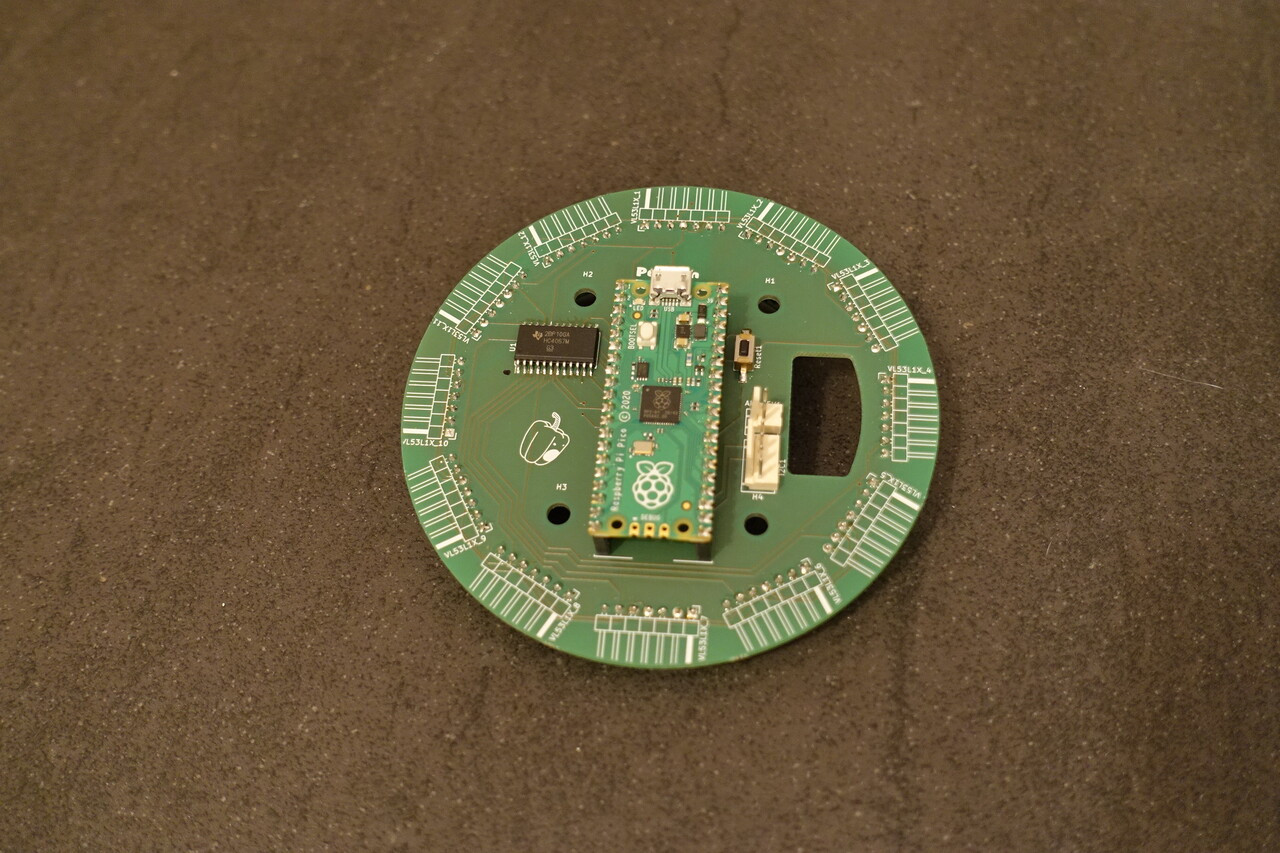
Détection - dessus

Détection - dessous
Les quelques lignes de code montrent que la carte se comporte comme prévu, avec la possibilité de désactiver les capteurs un par un.
Déplacement
Nous arrivons enfin à finaliser un mouvement qui nous tenait à cœur : avancer droit en faisant tourner le robot sur lui-même.
C’est probablement l’un des mouvements le plus complexe que le robot aura à faire et donc un bon moyen de valider notre architecture.
Bref, la joie du robot holonome !
Avancement
Du côté de nos tâches :
- Reprendre les tests avec la turbine
- Aspiration : nous avons enfin un prototype concluant
- Soufflage : abandon, nous allons tenter de propulser les cerises avec des roues.
-
Placer des contacteurs sur le robot pour détecter les bordures: Fait ! - Longer les bordures
- Transformer la base roulante en robot :
- Installer le mat balise
- Intégrer la turbine : réalisation à 90%
- Améliorer la détection de l’adversaire
- Électronique : carte reçue et partiellement soudée et testée
- Programmation : sélection des capteurs opérationnelle
Mots clés : Conception, Coupe, Électronique, Mécanique, Vidéo, Photo, Robot holonome, 2023
Le robot se structure + détection de l’adversaire
15 janvier 2023
À force de faire des essais et de laisser traîner la carte sur le bureau, une patte de résistance qui traînait a arqué et ça nous a motivé à faire un support propre pour la carte électronique.
Support carte électronique
Support carte électronique
Nous avons profité de l’arrivée d’un jeune nouveau membre pour commencer la carte de détection de l’adversaire. Si tout se passe comme prévu, nous utiliserons des capteurs VL53L1X :
- Côté électronique, nous sommes proches d’avoir fini le schéma
- Côté programmation, nous arrivons à lire un capteur, notre code est sur github.
Enfin, nous avons fini notre article sur les astuces pour utiliser VS Code pour le Raspberry Pi Pico.
Du côté de nos tâches :
-
Écrire notre mémo sur l’utilisation de VSCode avec le Raspberry Pi Pico: Fini à l’instant. -
Finaliser le code i2c non bloquant: Fait ! - Reprendre les tests avec la turbine
- Aspiration : nous avons enfin un prototype concluant
- Soufflage : les premiers essais donnent une bonne piste pour le prototype
- Placer des contacteurs sur le robot pour détecter les bordures
- Longer les bordures
- Transformer la base roulante en robot :
-
Fixer la carte électronique: Fait ! - Installer le mat balise
- Intégrer la turbine : conception ok
-
- Améliorer la détection de l’adversaire
- Électronique : schéma à 90%
- Programmation : lecture du capteur ok
Mots clés : Mécanique, Programmation, Photo, Robot holonome, 2023
Administration du site