Les bras montés sur le robot
5 janvier 2024
Préparation des bras
Nous vous avions présenté l’actionneur principal, notre pince 3 doigts. Il est temps maintenant de vous présenter nos actionneurs "secondaires". Il s’agit des petits bras qui tiendront les pots. Nous vous avions donné un aperçu du prototype fin octobre dans cette brève.
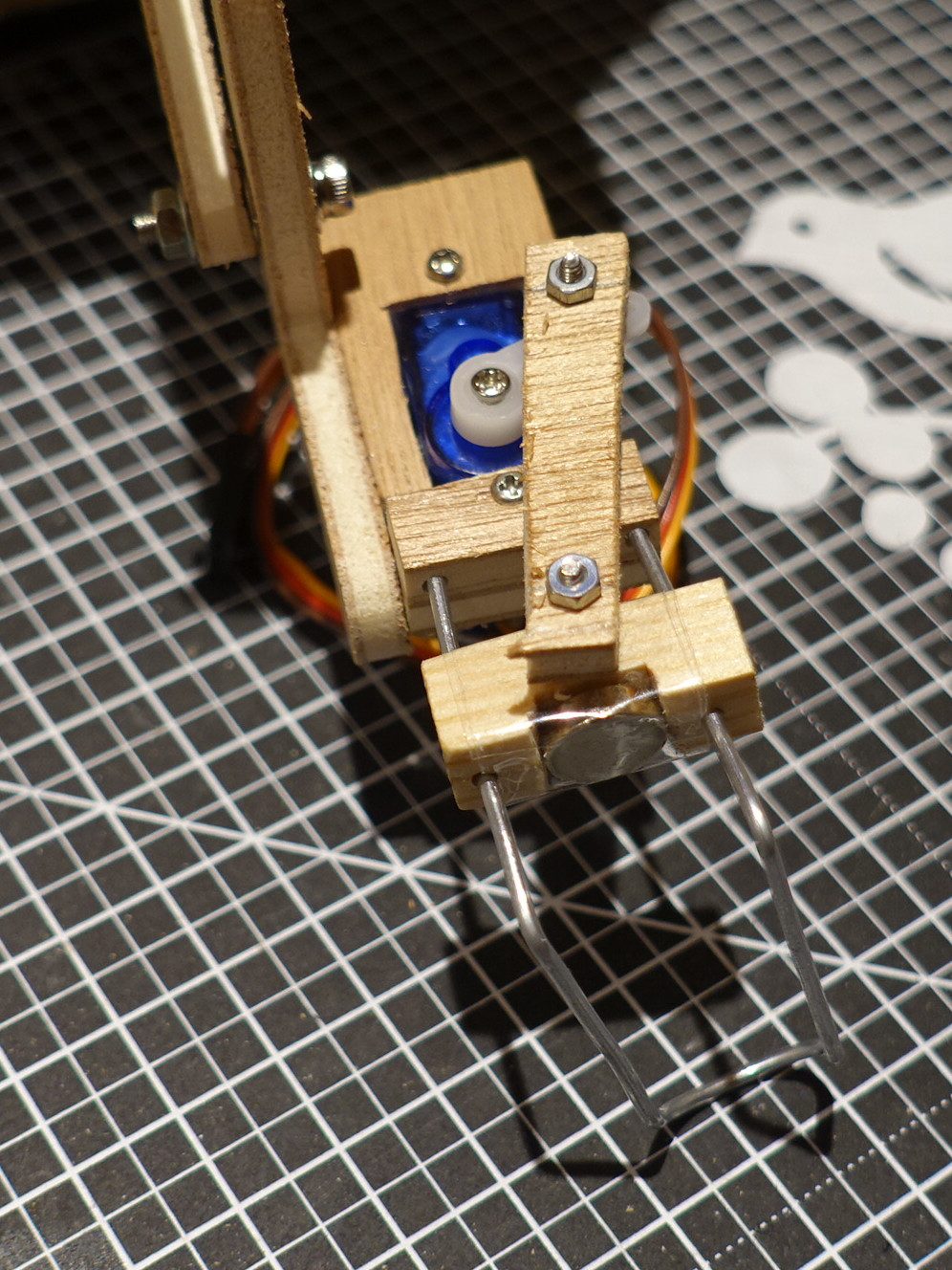
Revenons en détail sur fonctionnement du bras, il est composé de deux parties. La première partie permet de lever et d’écarter le pot du robot, c’est la partie la plus visible ci-dessous :

Bras pour pot - pré-série
La seconde partie approche ou éloigne un aimant du pot pour le prendre ou le lâcher.
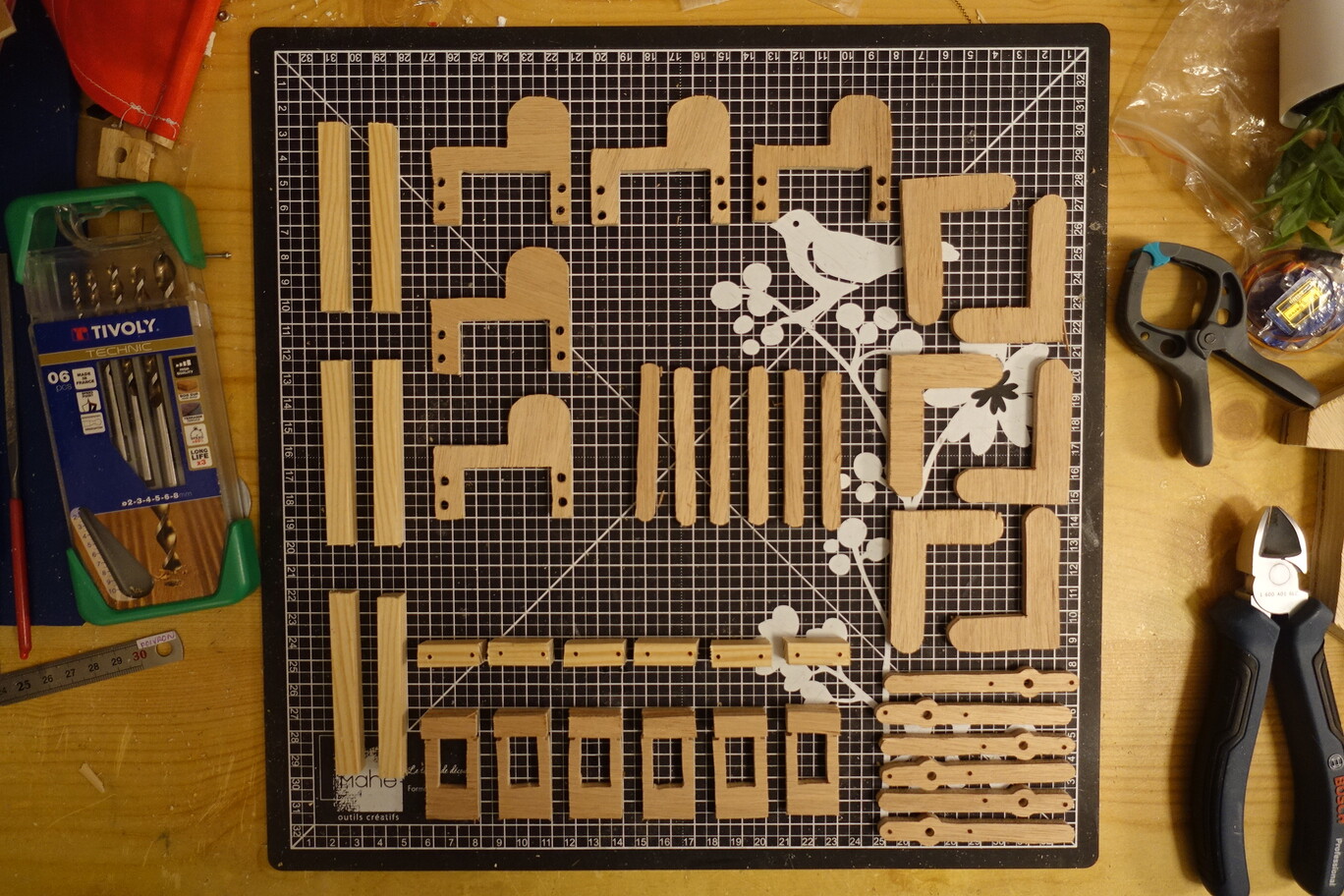
Nous avons d’abord réalisé un prototype, puis une version pré-série. Enfin, nous décidons de réaliser la série. Pour cela, il faut découper les pièces :

Pièces pour les bras pour les pots
Puis il faut percer les pièces avec précision. En fonction, soit nous perçons les pièces ensembles, 2 à 2, ou nous nous servons de gabarits de perçage pour être répétable.
Pièces percées
On ne dirait pas comme ça, mais c’est un peu de boulot de percer ces pièces !
Préparation du châssis
En parallèle, nous découpons le châssis.

Châssis du robot 2024
Nous perçons les trous de fixation des moteurs. Pour cela, nous utilisons l’ancien châssis comme gabarit et obtenons rapidement une sorte de base roulante.

Mécanique de la base roulante
Assemblage des bras
Il va falloir assembler les bras de manière à respecter la position des pots prévue initialement.

La base roulante sur son plan
Vous n’aurez pas de photos de l’assemblage des 6 bras. Avec la visserie, il y a plus d’une cinquantaine pièces par bras. Bref, ça nous a pris un peu de temps, mais le résultat est là :

Base roulante avec pots
Et en détail (notons qu’il manque le pignon et la bielle entre le servomoteur et l’aimant) :

Bras qui tient un pot

Bras qui tient un pot
Ce qui donne en action :
La suite...
La suite, car nous sommes loin d’être en avance sur la planning, se compose principalement des tâches suivantes :
- Régler les 5 positions des 6 bras
- Finir de concevoir le 3e axe pour la pince 3 doigts
- Rallonger les câbles des codeurs de moteurs
- Fixer le capteur de détection des plantes
- Fixer la batterie et la carte électronique
Ensuite, nous pourrons commencer les déplacements sur le terrain !
Commentaires
Il n'y a pas de commentairesAjouter un commentaire
Administration du site