Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
3 jours avant la coupe - le poster !
5 mai 2024
Voici le poster de cette année :
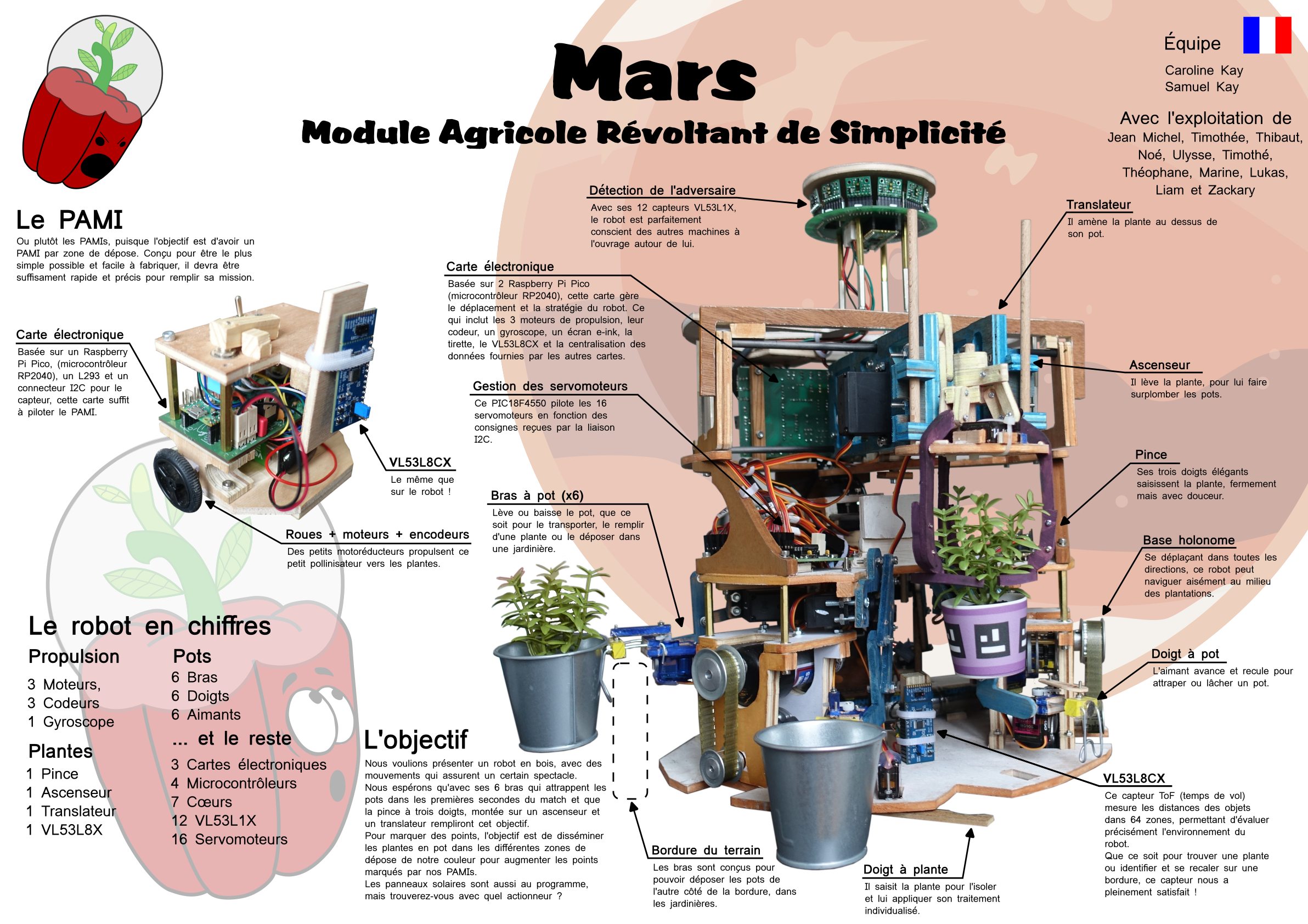
Poster 2024
Côté avancement sur le robot, c’est mitigé :
- D’un côté la gestion des plantes est loin d’être au niveau de ce que nous aimerions !
- De l’autre, nous commençons a gérer un bon nombre de cas de défaillances et nous avons fait de petite amélioration que nous amène pas très loin d’un niveau acceptable.
Les PAMIs ont bien avancé, mais un seul a été testé...
Donc en gros, c’est tendu !!
Mots clés : 2024, Poster, Mini robot (PAMI)
2 semaines avant la coupe
23 avril 2024
Voilà un mois que nous n’avons rien publié et nous voilà à 2 semaines de la compétition... Mais qu’avons-nous fait ?
Le VL53L8X
Rappelons que ce capteur mesure 64 distances à chaque acquisition, répartis sur une grille de 8x8.
Ce capteur nous a bien occupé et les résultats sont au niveau des attentes. Le robot détecte les bordures et se recale. Il trouve même sa position de départ tout seul !
L’identification de la bordure se fait en prenant 8 points horizontaux. Nous utilisons une régression linéaire et les caractéristiques de la droite trouvée nous ont vite donné satisfaction. Ce qui nous a embêté, c’est le rejet des valeurs perturbées par la présence d’un pot devant la bordure. Pour cela, nous utilisions un critère, nommé qualité de prédiction par Wikipédia. Ce critère, pour estimer que les points forment une droite, est proche de 1 si les points forment une droite, proche de 0 dans le cas contraire. Or dans notre cas, face à une bordure, le critère variait en fonction de l’angle du robot avec la bordure. Ci-dessous, nos données expérimentales :
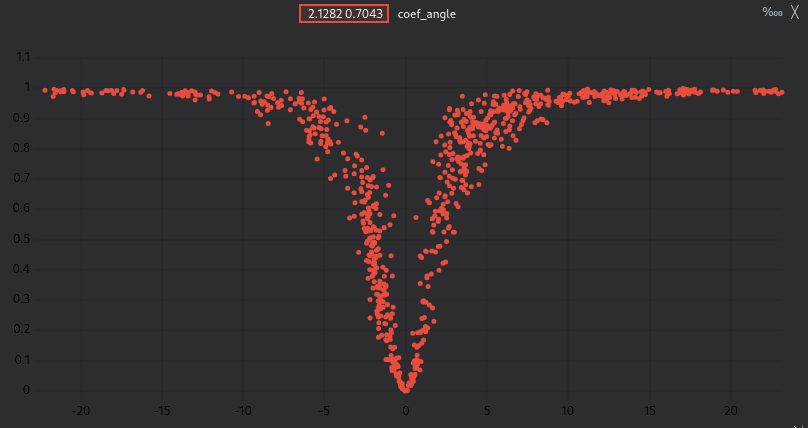
Critère régression linéraire
L’explication détaillée mériterait un article, mais en gros, le critère que nous utilisions évaluait le rapport entre la variation en Y des points théoriques par rapport à la variation en Y des points réels. Quand l’angle entre la bordure et le robot est proche de 0, la variation des points théoriques devient très faible alors que la variation des points réels reste constant à cause des erreurs de mesures.
Nous avons bidouillé notre propre critère en se basant sur les écarts en les Y réels et les Y théoriques.
Le capteur permet aussi au robot de trouver les plantes, avec une logique simple, ciblant le point le plus proche.
Attraper les pots
Le robot a attrapé ses premiers pots. Un moment touchant pour nous, car le spectacle semble à la hauteur de nos espérances.
PAMI
Nous vous avions présenté la conception de la carte électronique des PAMIs, voici la conception mécanique !
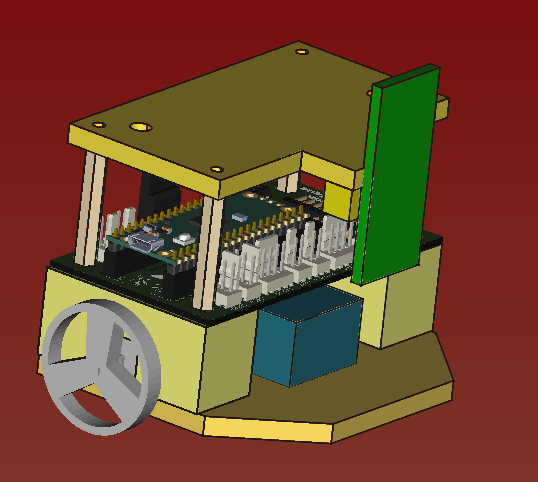
Modélisation PAMI 2024
Et le premier PAMI partiellement monté :
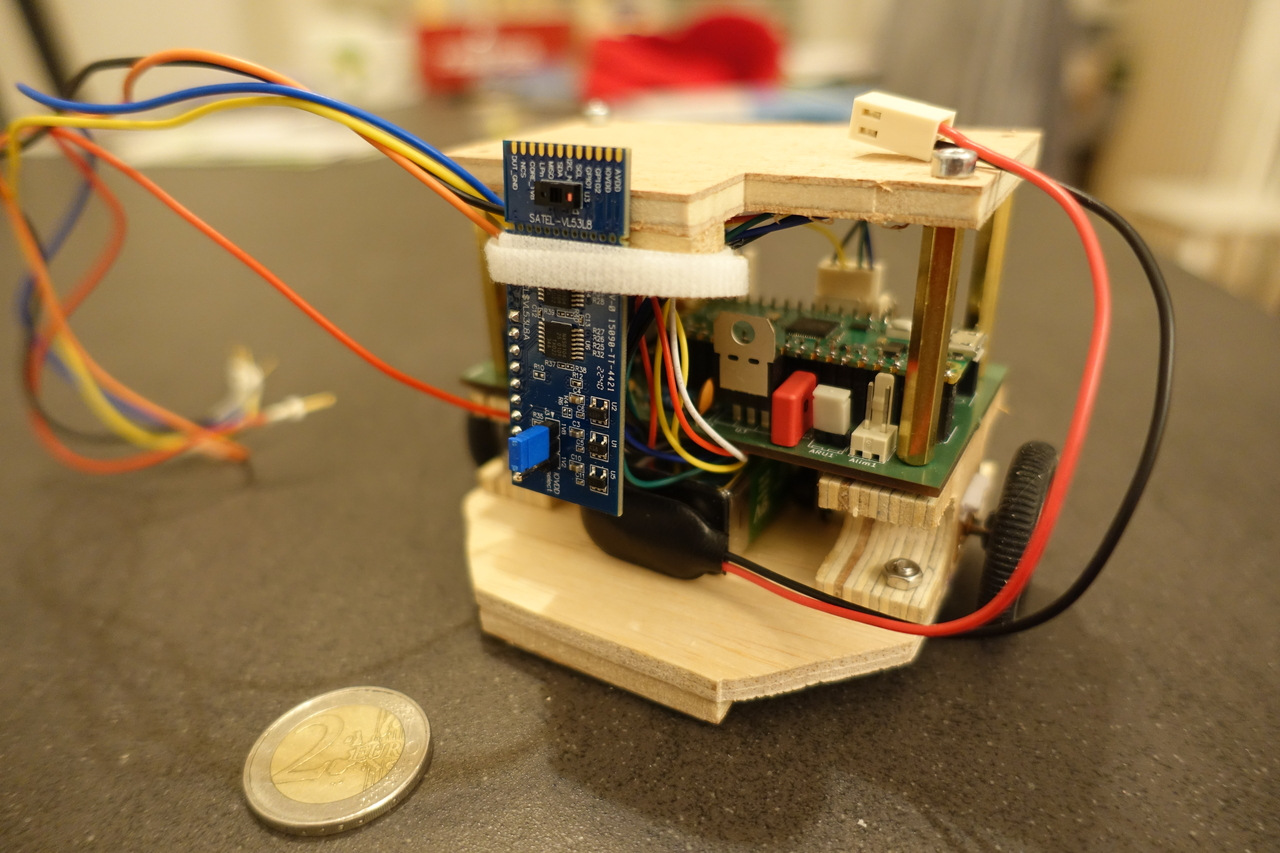
PAMI 2024 - montage en cours
La suite
C’est maintenant une course contre la montre :
- Aurons nous le temps (et les pièces) pour fabriquer 6 PAMI
- Le gros du code du robot semble être en place, mais il faut
- intégrer la tirette ;
- intégrer la gestion de la couleur de démarrage ;
- s’assurer que la détection de l’adversaire fonctionne ;
- réaliser un semblant de stratégie
Mots clés : 2024, Capteur, Vidéo, Mini robot (PAMI), Programmation
La pince à 3 doigts marche !
23 mars 2024
... mais ce n’est plus un grappin.
Après nos essais non-concluants, nous nous sommes remis au travail. Nous avons coupé les doigts du grappin, percer des trous pour pouvoir fixer différents types de doigts. Finalement, notre seconde itération s’avérera concluante.
Finalisation électronique
Nous avons fixé nos cartes électronique et raccordé la quasi-totalité de capteurs et actionneurs. Il ne manque que la tirette, le bouton de sélection de la couleur de l’équipe et le petit écran qui indique le score.
Ce qui nous a permis de reprendre le programme de l’an dernier et ses nombreux tests unitaires. Le début ne s’est pas fait sans mal :
❌Recompilation du code en mode test : pas de mode test
❌make clean puis recompilation en mode test : pas de mode test
❌rm -r build/* puis recompilation en mode test : mode test OK (c’est le cache du cmake qui posait soucis), mais pas de retour des codeurs
❌ Oh, le code de test n’initialise pas le module codeur : le code tourne, mais les codeurs sont à 0 en permanence
✅ Ah, oui, après relecture du plan de la carte, les codeurs ne sont pas alimentés par l’USB. On attrape l’arrêt d’urgent de l’an dernier, le connecteur pour la batterie, la batterie et Oh ! Les données arrivent !
✅ Quoi ? Pas de graphique teleplot pour nos codeurs : ça c’est corrigé !
La suite se déroule beaucoup mieux :
✅ Lecture des codeurs
✅ Pilotage des moteurs
✅ Asservissement des moteurs
✅ Lecture du gyroscope
✅ Localisation par codeur + gyroscope
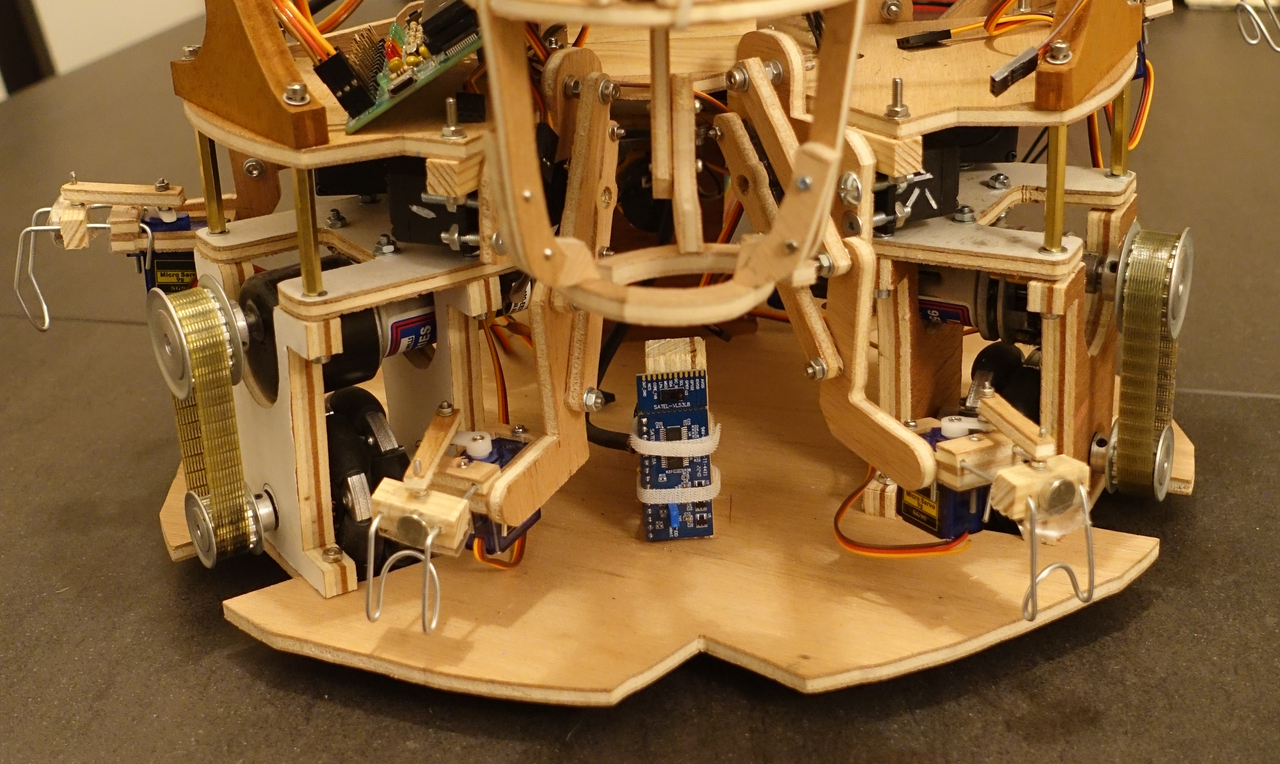
Finalisation mécanique
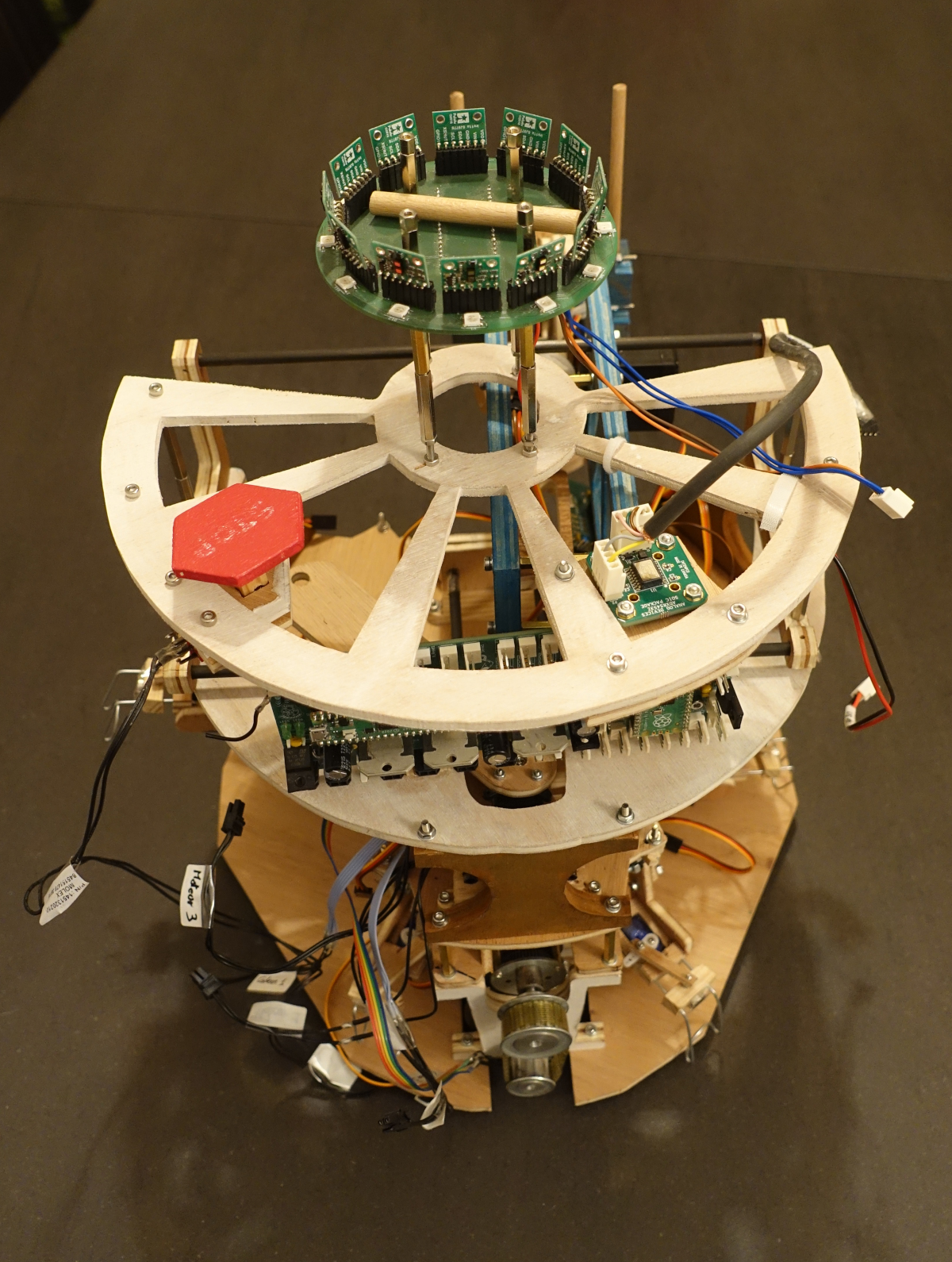
Vue arrière du robot (mars 2024)
Nous fixons l’arrêt d’urgence (à cause du souci rencontré plus haut), le gyroscope et le capteur de détection des plantes (VL53L8).
L’arrêt d’urgence se base sur notre système habituel, une sorte de tringlerie en bois qui active un interrupteur à levier.
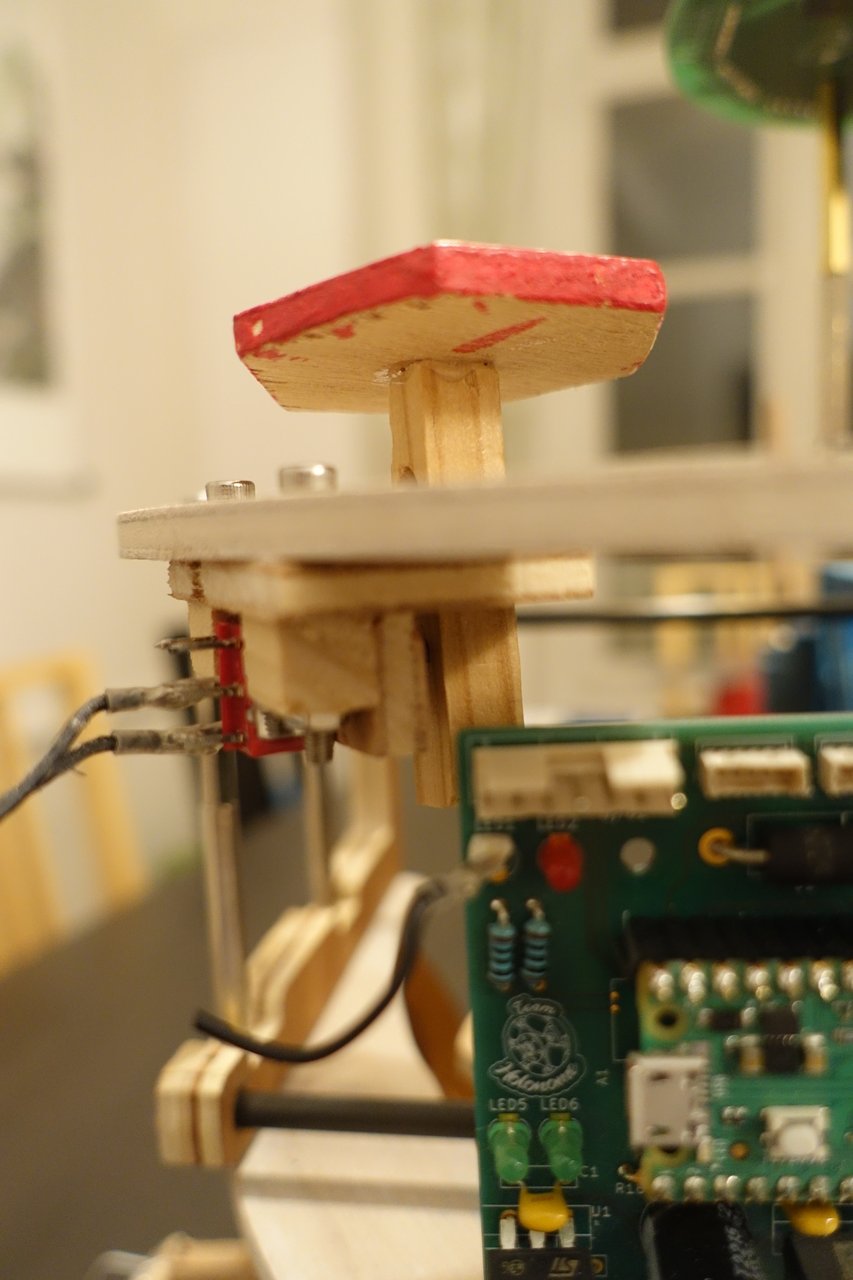
Arrêt d’urgence (2024)
Le gyroscope est situé à un endroit accessible, afin de facilement pouvoir y accéder en cas de soucis (notamment l’enfermer dans une cage en aluminium).
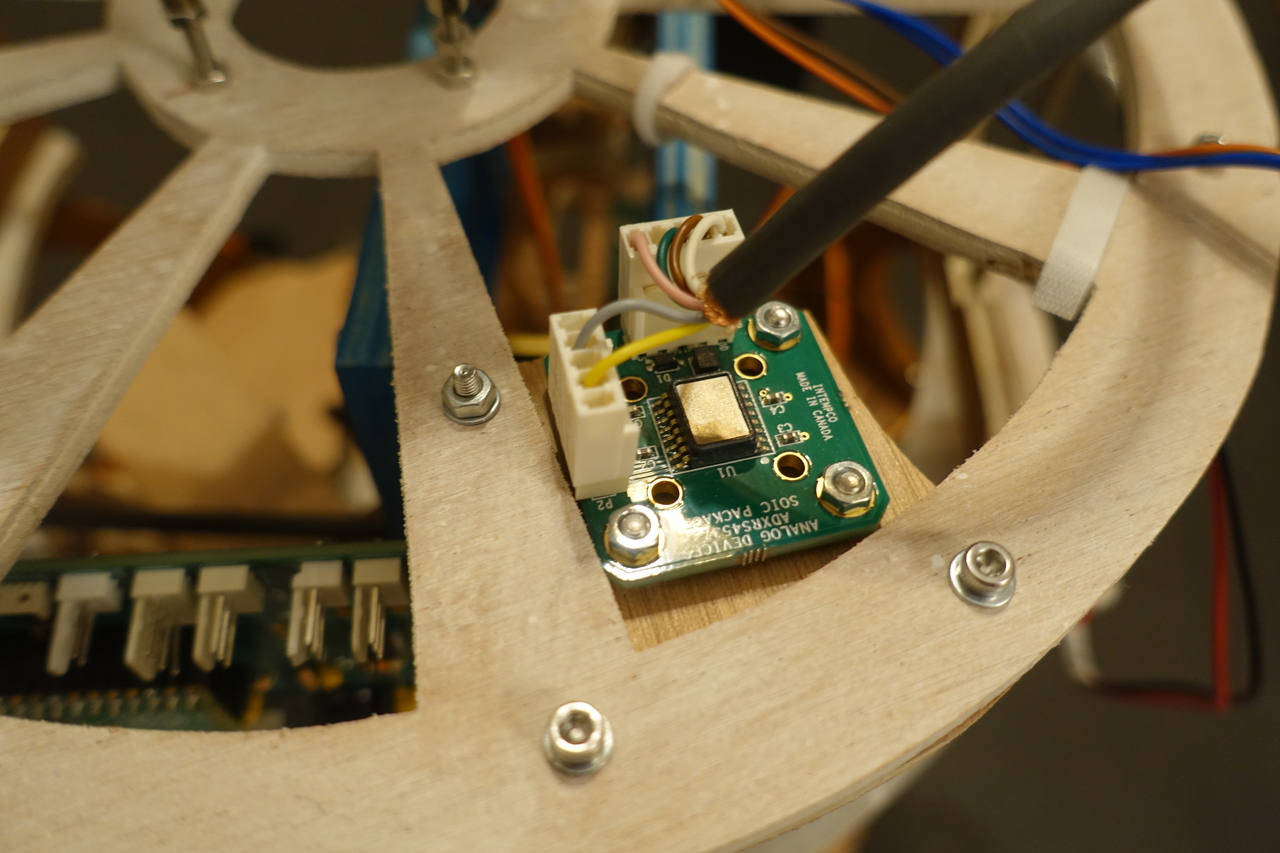
Gyroscope - sur le toit du robot
Et notre capteur est situé au milieu du robot, à hauteur des plantes qu’il doit identifier.
VL53L8 - Monté sur le robot
Programmation
Nous avons réglé les positions des 6 bras avec leurs aimants et rajouter sur la carte servomoteur, le code pour communiquer en I2C.
Le gros point restant est le traitement du capteur VL53L8 et la stratégie !
Mots clés : 2024, Mécanique, Programmation, Photo
Le grappin ne fonctionne pas
2 mars 2024
S’il est important de célébrer nos succès, il faut parfois célébrer nos échecs. Après tout, n’est-ce pas d’eux que nous apprenons le plus ?
Alors, nous partageons avec vous notre conclusion, le grappin, pour attraper les plantes ne fonctionne pas. Ou alors pas de manière suffisamment fiable pour être utilisé à coupe.
La preuve en image :
Que faire maintenant ? Nous avons analysé le problème et trouvé deux causes :
- la séquence du programme semblait se comporter de manière erratique, certains temps d’attente n’étaient pas toujours respectés. Un problème lié à la lecture d’une variable 16 bits, dont la valeur était modifiée en interruption, sur une architecture 8 bits.
- mécaniquement, l’appui par trois points ne convient pas à la géométrie des plantes.
Nous vous présenterons prochainement nos améliorations. Nous utiliserons bien une pince 3 doigts pour attraper les plantes, mais ce ne sera pas un grappin !
L’électronique des PAMI
28 février 2024
Les PAMI sont des petits robots autonomes qui entrent en jeu dans les 10 dernières secondes du match.
Voici la carte électronique que nous comptons utiliser si nous avons le temps de réaliser ces PAMI.

Les fonctionnalités principales sont :
- Microcontrôleur Raspberry Pi Pico
- Connecteur pour l’arrêt d’urgence
- 2 prises moteurs (pilotés par un L293D)
- 2 prises codeurs
- 1 prise Gyroscope (L3GD20H)
- 1 prise I2C pour du TOF
- 1 prise "choix couleur"
- 1 prise tirette
- Surveillance tension batterie
- 1 LED
- 3 Dip Switch
Dimensions : 50 mm x 90 mm
Tous nos fichiers sont ici.
Mots clés : 2024, Électronique, Mini robot (PAMI)
Administration du site