Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
Premiers points !
28 novembre 2021
Voilà nous sommes fin novembre et nous avons le plaisir de réaliser nos premiers points !
Ce samedi a été consacré à l’achat de planches pour la table et ses bordures. Bien que nous ayons de quoi faire une table complète, nous n’avons fait qu’une demi table primitive, composée de deux planches légèrement bombées...
Ce soir, nous avons passé un peu de temps à initier le code pour la stratégie 2022, puis dessiné nos deux premières trajectoires. Nous mettons le plan du règlement à l’échelle 1mm : 1 px, dessinons les trajectoires et recopions les coordonnées des points des courbes de Bézier dans notre code.

2022 - premières trajectoires
C’est fait à la Rache, les contacteurs pour s’assurer que le robot est en position ne sont pas utilisés mais ça marche, au mois 3 fois sur 4 !
La vidéo est disponible en 720p ici (Ogg - 10 Mo)
Les travaux de cet été 2021 (1/2) - La supervision
22 novembre 2021
Le contexte
Quand j’ai choisi de re-participer à Eurobot, nous étions à quelques jours des finales. Alors j’ai choisi de re-travailler sur notre robot précédent. Deux points me chagrinaient, le premier étant les capacités de supervision du robot.
La supervision
Ce qu’on peut faire avec une liaison série, un peu de python et de Qt.
Les servomoteurs
Chaque année, le réglage des positions des servomoteurs se fait en entrant une valeur au hasard, compilant le code et testant. Il faut une petite quinzaine d’itérations pour affiner chaque position. Alors qu’il suffit de pas grand chose pour lier une commande de la liaison série à la commande d’un servomoteur.
Donc voilà, nous définissons une trame simple, qui permet de forcer la position d’une servomoteur. La trame est la suivante :
"Sxpppp"
- S pour Servo
- x pour le numéro du servomoteur à pilote
- pppp pour la position à atteindre, en hexadécimal.
Sur l’interface graphique, 6 boutons, 3 pour avancer d’un petit pas, d’un pas moyen ou d’un grand pas, 3 pour reculer. Ces boutons sont un peu rigides, alors je rajoute un curseur horizontal (QSlider) qui permet d’atteindre une position approximative très rapidement. Enfin, un champ texte affiche la position actuelle.
Un dernier bouton permet de récupérer la position actuelle de tous les servomoteurs.

Supervision - servomoteurs
La surveillance
Vient ensuite le problème du robot, très fréquent, du "mais qu’est-ce qu’il lui a pris de faire ça ?". Vous avez généralement le choix, pour comprendre ce qu’il se passe.
Soit vous banchez un débogueur sur votre robot, mais chez nous, ça ne marche pas génial. Les broches de debug sont utilisées pour autre chose, le débogueur Microchip n’aime pas trop les interruptions et rapidement, nous n’arrivons même pas à reproduire le bug avec le débogueur branché (alors que sans, c’était 100% reproductible).
Soit vous émettez un signal en fonction des états de votre programme (comme allumer une LED). C’est une solution simple, qui a le mérite de bien marcher dans des cas simples.
Avec la surveillance, le robot émet sur la liaison série toute une série de valeurs correspondant aux états du robot (position, orientation, distances des obstacles, etc...) à intervalles réguliers. Comme le robot émet un entête descriptif de ce qu’il va envoyer, nous pouvons modifier l’ordre des valeurs, en enlever ou en rajouter sans toucher au code de la supervision.
L’interface n’est pas très soignée, mais nous avons quand même deux panneaux.
Le premier affiche les valeurs actuelles :

Supervision - état actuel
Le second un graphique pour la valeur sélectionnée. Généralement en fonction du temps, mais afficher la position Y en fonction de la position X est tellement parlant que nous ne nous en sommes pas privé :

Supervision - graphique
La communication
Enfin, toujours pour aider au debug, nous renvoyons sur la liaison série ce qui transite sur la liaison I2C. Soyons clair, ce ne serait pas adapté à de gros débit de communication. Mais dans notre cas ça marche !

Supervision - communication
Les bonus
La sauvegarde
Analyser à chaud, c’est bien. Pouvoir reprendre les logs précédents pour revoir un détail qui nous aurait échapper, c’est mieux. Chaque acquisition est enregistrée et peut être rechargée.
Le Python
Le programme est développé en Python, avec PyCharm. PyCharm est puissant mais parfois un peu lent à lancer. Alors lorsque nous avons voulu lancer notre programme sans ouvrir PyCharm, nous avons rencontré deux erreurs :
$ python Supervision.py
...
SyntaxError: invalid syntax
Sous Debian, notre Python est Python 2.7. Essayons avec Python3 :
$ python3 Supervision.py
...
ModuleNotFoundError: No module named 'PyQt5'
Et pourtant, ça marche avec PyCharm.
Le secret réside dans les environnement virtuels. PyCharm utilise venv.
$ source venv/bin/activate
Et là, un simple :
$ python3 Supervision.py
lance l’application.
Pour quitter l’environnement virtuel, utilisez la commande suivante :
$ desactivate
Plus de détail sur les environnements virtuels pour le Python, je vous conseille cet article de Linuxfr.
Mots clés : Programmation, Eurobot 2022
Avancement mi-novembre 2021
13 novembre 2021
Quoi de neuf ?
La reproduction du terrain
Nous ne ferons pas un terrain complet. Pas avant plusieurs mois en tout cas. Mais nous réalisons l’angle qui accueille la statuette ainsi que les échantillons qui se trouvent dessus.

Angle du terrain 2022
Le robot
Nous avons dépouillé notre ancien robot, il ne lui restait que la planche de base, les moteurs, le gyroscope et la carte électronique.

Robot tout nu
Nous nous faisons un petit plaisir, nous construisons un support mobile pour la carte électronique. La carte sera en position verticale pour un match, mais son support peut se mettre en position horizontale pour faciliter les branchements et les mesures.

Robot 2022 - carte électronique pliée
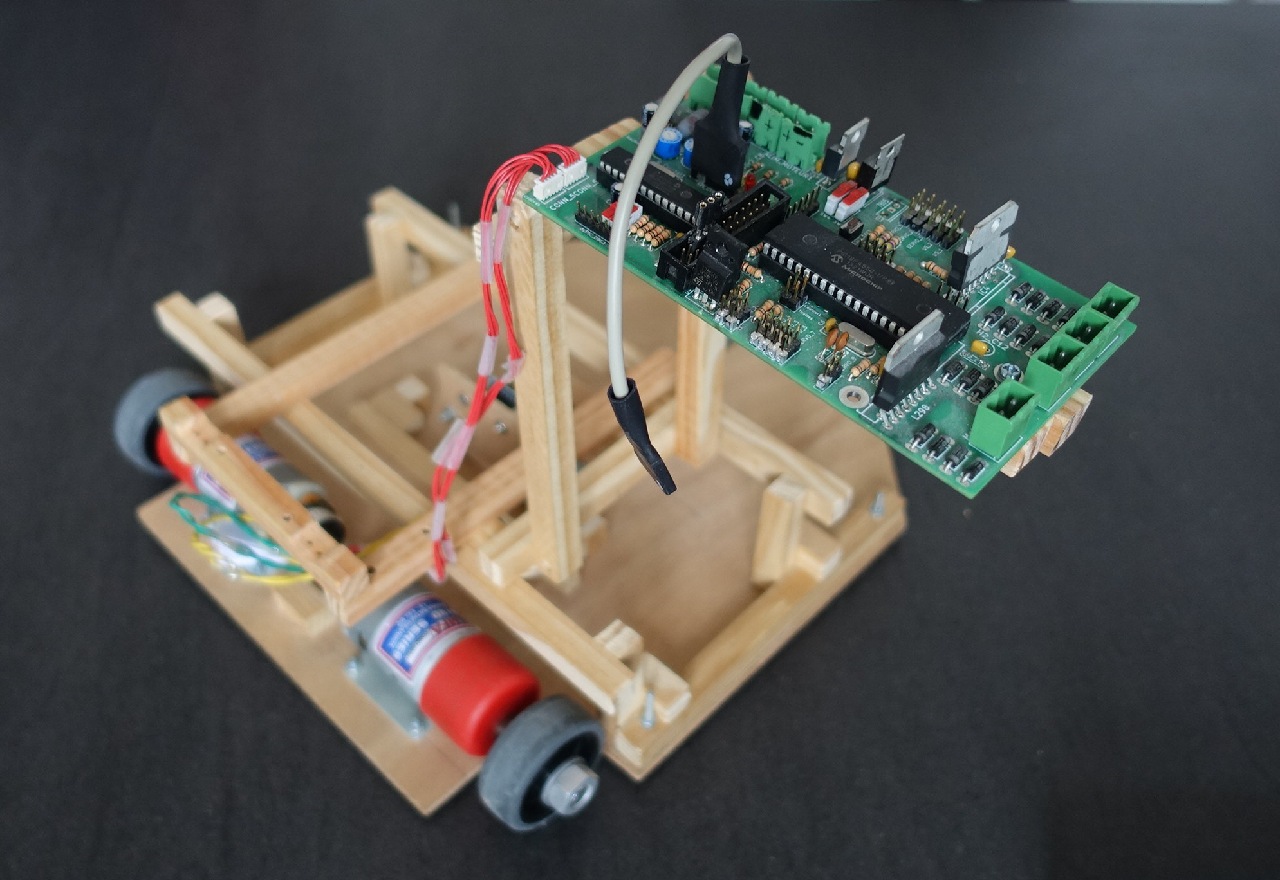
Robot 2022 - carte électronique dépliée
L’inconvénient, c’est que nous devons refaire tous nos câbles en plus longs. Et ça, ça va nous occuper un petit moment.

Robot 2022 - support carte électronique
Côté actionneurs, nous en avons commencés deux. Le premier pour attraper la statuette, le second pour déposer la réplique.
Actionneur de la statuette
Nous comptons sur du velcro pour attraper la statuette. Notre bras n’utilisera qu’un servomoteur pour attraper et déposer la statuette. Le bras est construit, mais il faut encore le fixer sur le robot.

Actionneur de la statuette
Actionneur de la réplique
Pour l’instant, nous n’avons mis en place que les deux contacteurs qui nous indiqueront le bon positionnement du robot. Avec deux contacteurs, si le robot n’est pas bien positionné, il est possible de savoir de quel côté il doit se décaler. Nous avions utilisé un système similaire en 2012 pour accoster les totems qui contenaient les lingots.
Et la suite ?
Tout d’abord, nous devons finir nos câbles puis l’actionneur de la réplique. Ce sera probablement l’occasion pour le robot de faire quelques tours de roues, pour s’assurer que nous arrivons à déposer la réplique.
Ensuite, il faudra positionner l’actionneur de la statuette.
Ce qu’on se garde pour plus tard
Et oui, nous sommes loin d’avoir fini. Voici, en vrac, ce qu’il nous faudra réaliser :
- Le positionnement des capteurs d’évitement.
- la réalisation de la vitrine
- le mat balise
- le bras latéral pour retourner les carrés de fouille
- tester, tester, et ... tester !
Bref, ce n’est pas fini, loin de là !
Mots clés : Coupe, Mécanique, Eurobot 2022, Photo
Eurobot 2022
24 octobre 2021
Règlement officiel
Ça y est, le règlement officiel est sorti ! Vous pouvez le trouver sur le site de coupederobotique.fr, plus précisément ici.
Le forum pour discuter du règlement, voir les questions posées sur la version bêta est là.
Enfin, le forum pour discuter de la compétitions, présenter l’avancement des robots et autres se trouve ici.
Portail des équipes
Nous relançons le portail des équipes, disponible ici : http://poivron-robotique.fr/planet. Vous souhaitez apparaitre sur le portail, envoyez-nous un message !
Notre participation
De notre côte, même si tout n’est pas réglé, nous devrions participer à l’édition de cette année.
Nous avons reproduit quelques éléments de jeux et un petit bout de terrain.
Nous avons défini notre stratégie, avec un seul robot pour l’instant. Nous nous concentrons sur les actions simples et ferons un second robot si c’est trop facile (mais nous en doutons fortement).
Pour l’instant, notre stratégie est la suivante :
- Faire tomber les deux échantillons de l’abri de chantier et les pousser sous l’abri
- Prendre la statuette
- Déposer la réplique
- Déposer la statuette dans la vitrine
- Découvrir les carrés de fouille
- Rentrer dans la zone de départ
Si nous tenons notre contrat, nous devrions faire un bon paquet de point, mais clairement sans viser les premières places.
Le Wiki
Enfin, Planète Sciences/Eurobot a tenté de mettre un wiki à disposition des équipes. Nous avons apporté notre part et continuerons probablement d’y contribuer un peu au cours de l’année. Vous le trouverez à cette adresse : https://www.eurobot.org/wiki/fr/home. N’hésitez pas à le compléter !
Mots clés : Coupe, Eurobot 2022
Documenter ses cartes électroniques
9 août 2021
J’ai eu l’occasion de réveiller un vieux projet et de me heurter à un certain nombre de problèmes liés à l’obsolescence. J’en détaillerai probablement une partie prochainement.
Quand on ressort une vieille carte électronique, arrive rapidement la question du brochage des différents connecteurs. Je viens justement de trouver Pinion. C’est un outil qui permet de documenter les carte électroniques avec un rendu web impressionnant.
Je détaille l’utilisation de Pinion dans un article dédié que vous trouverez ici.
En attendant, voici le résultat obtenu après une petite journée de prise en main.
Mots clés : Électronique, Site, Eurobot 2022
page précédente 1 ... 11 12 13 14 15 16 17 18 19 ... 37 page suivante
Administration du site