Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Mesure des résistances et avancement général
17 mai 2022
Nous sommes le 17 mai 2022 qui se situe exactement en "J-pas beaucoup" et "J-pas assez".
Mise à jour de notre Todo List :
-
Affichage du score-
Fixer l’écran, le Raspberry Pi et le nouveau bouton On/Off
-
-
Réaliser la cale pour positionner le robot en début de match -
Panneau de 70x100 mm à installer sur le robot - Détection des résistances :
-
Conception et réalisation mécanique -
Adaptation du câblage -
Code du module - Intégration dans la stratégie
-
- Stratégie alternative en cas de robot bloqué
- Contrôler et adapter la position du robot lors de la dépose de la réplique, pour garantir qu’elle soit à 100% sur le socle à chaque fois.
Senseur pour résistance
La zone où mesurer la résistance n’est pas très grande, elle se situe sur un plan incliné et comme nous souhaitons être robuste aux variations de positionnement de notre robot, ceci nous pose des soucis.
Nous avons conçus une mécanique pas si simple, mais qui ne nécessite qu’une seul actionneur. Les essais montrerons que nous manquions d’un degré de liberté, ce qui nous amènera à installer un système à ressorts en plus de l’élastique. Voici l’idée, sur l’image ci-dessous, seul le bras bleu est actionné par le servomoteur :
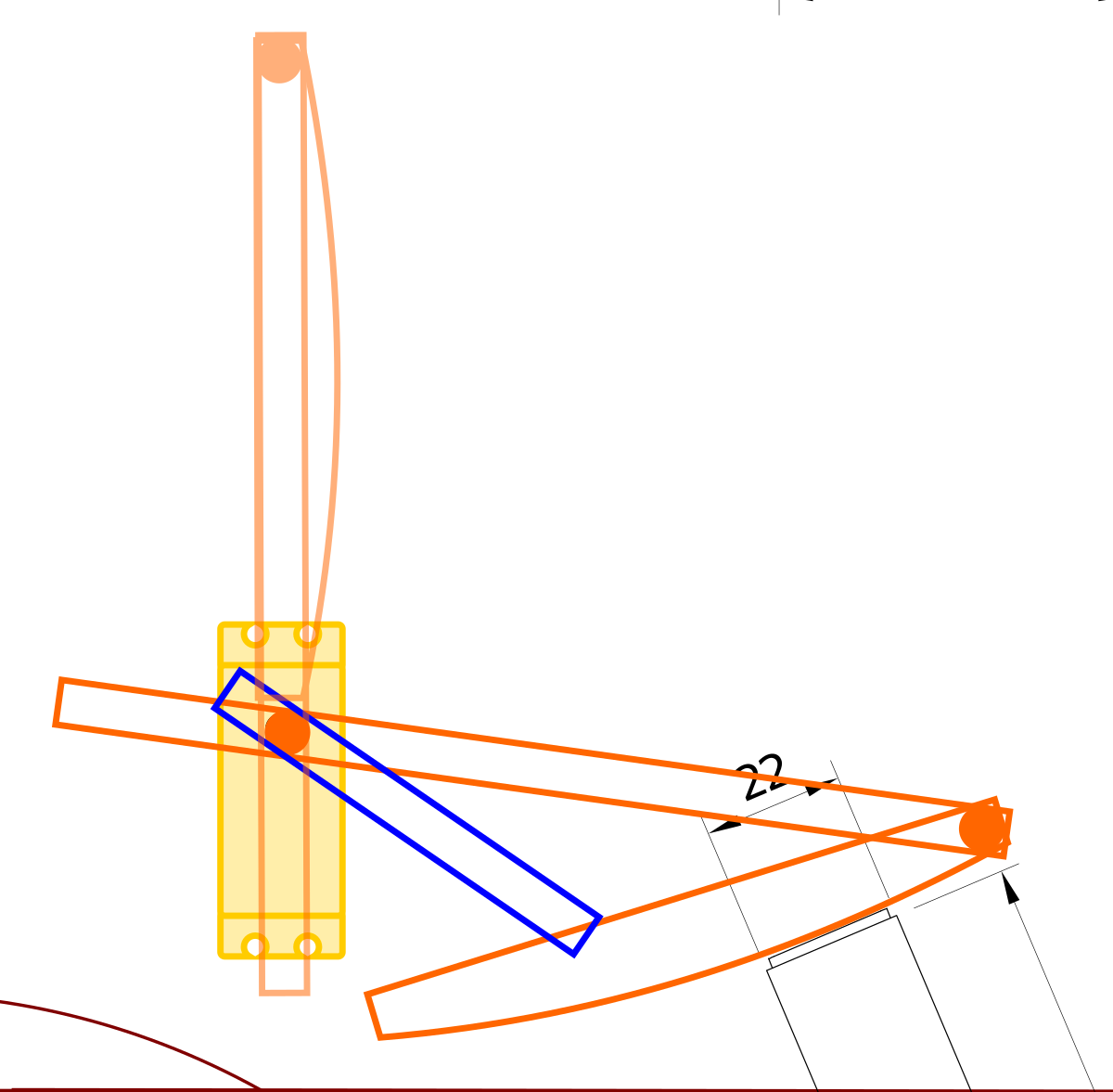
Principe du "Senseur R"
Tout commence avec un profilé qui ressemble à une nervure d’aile d’avion : il nous faut une belle courbe :

Comme une aile d’avion
Ensuite nous montons ceci sur un mat, avec un axe et nous rajoutons le contact électrique. Ne trouvez-vous pas que ce fils de cuivre a un certain charme sur le bois ?
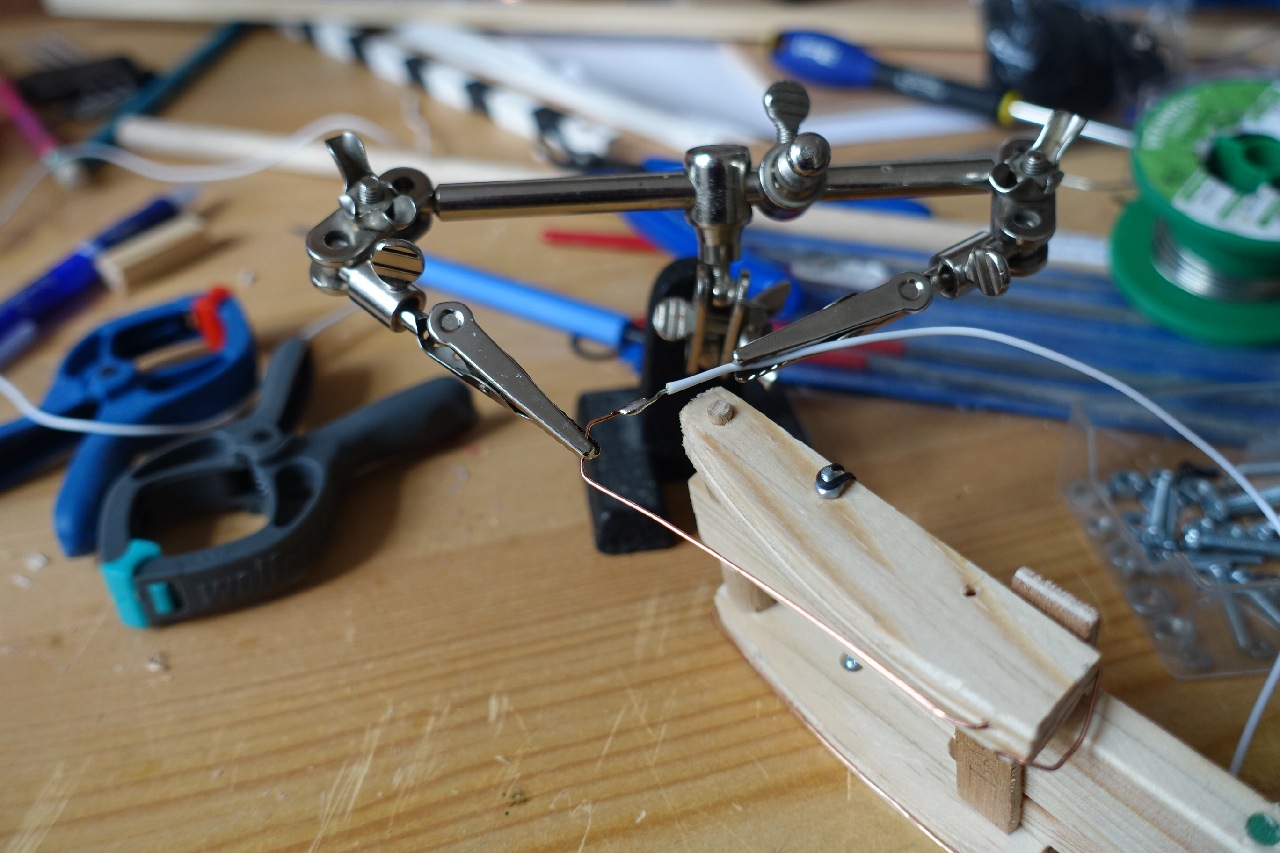
Le cuivre et le bois
Ce qui, une fois fini et câblé ressemble à ceci :
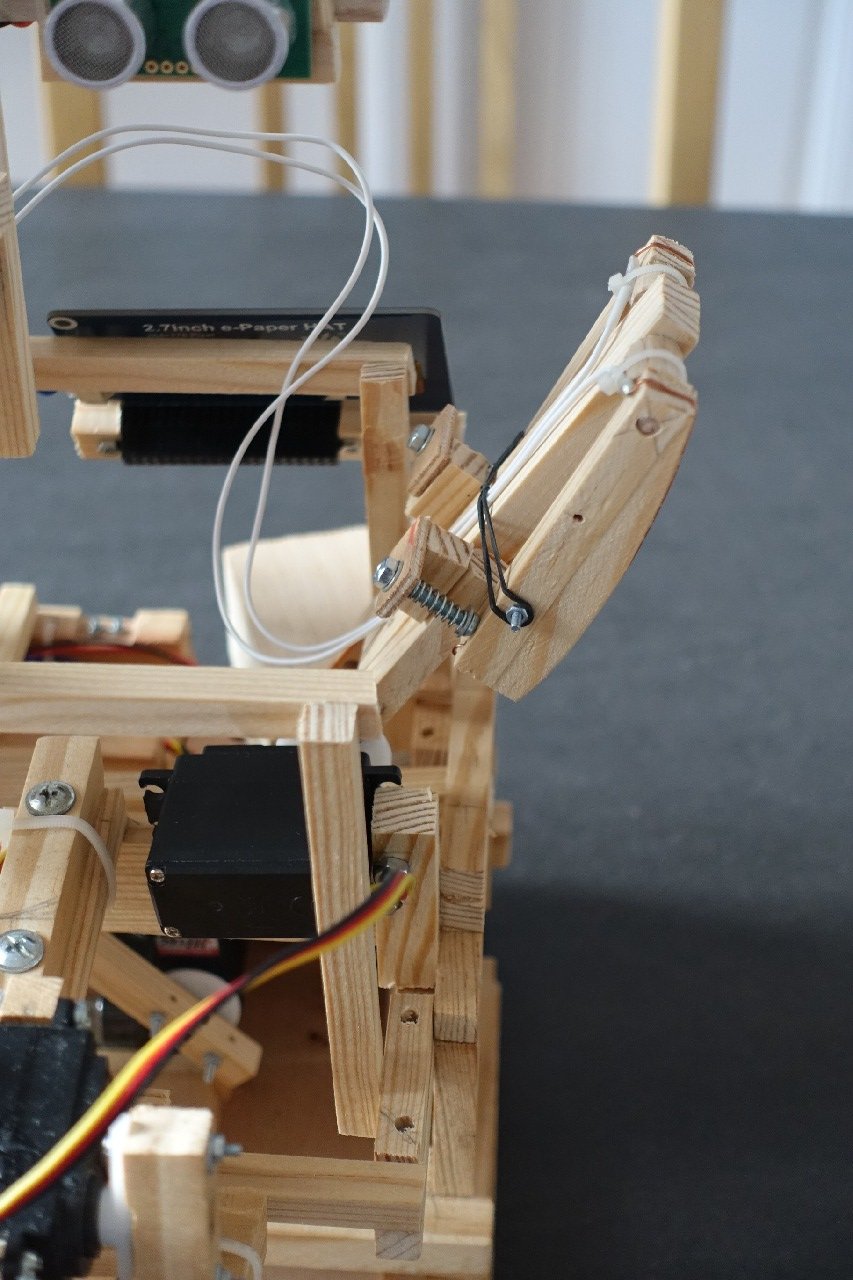
Senseur R monté
Nous pourrions dire qu’afin d’avoir le système le plus robuste possible, nous avons un élément de test le plus moche possible, mais ce ne serait pas 100% exact.
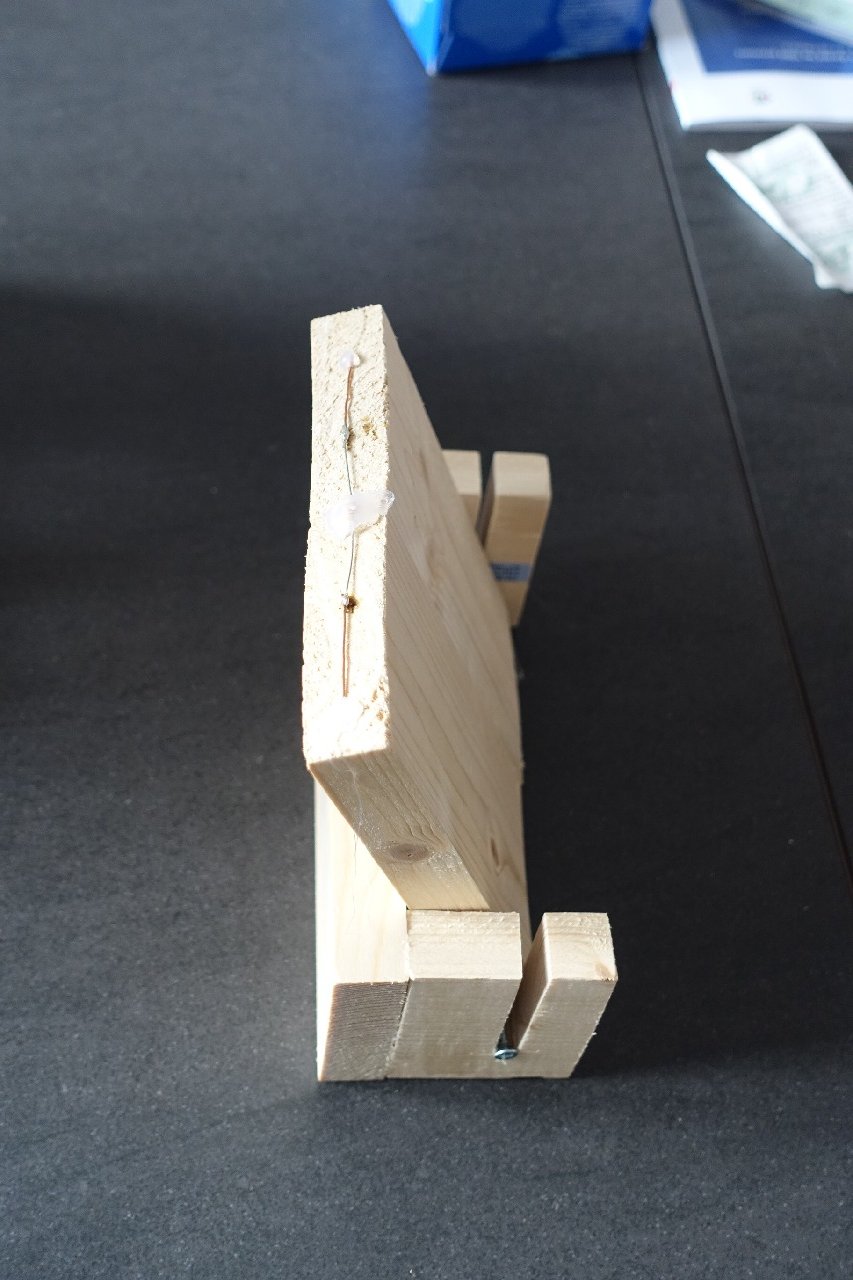
Élément de test - carré de fouille
Et pour conclure, une courte vidéo du système en action :
La vidéo est disponible en 720p ici (mp4 - 5,6 Mo).
Mots clés : Conception, Coupe, Essais, Vidéo, Eurobot 2022, Photo
Préparer l’homologation (3)
24 mai 2014
L’homologation dynamique
L’homologation dynamique permet aux arbitre d’évaluer le comportement du robot lors d’un match.
Marquer un point
Ou plus précisément marquer plus de point que vous en offrez à l’adversaire. Si vous n’êtes pas tout à fait prêt, visez un point simple tel qu’un feu, une fresque ou un tir de lance sur le mammouth à coté de vous. Ne cherchez pas à sortir le grand jeu, une action, une seule peut vous offrir le précieux sésame.
Éviter l’adversaire
Marquer un point n’est pas suffisant, encore faut-il que votre robot soit sans danger pour votre adversaire. Nous avons déjà eu affaire à des arbitres retors. Votre robot s’arrête devant l’obstacle, votre cher arbitre vous fait remarquer qu’il serait bien de ne pas rester planter là (il s’agissait d’une simple remarque, rien d’éliminatoire). L’année suivante, nous choisissons de reculer un peu si le robot détecte un obstacle. Évidemment, l’arbitre déplace le robot fictif et le met derrière notre robot... Nous avons du repasser l’homologation en corrigeant ce point !
Conclusion, n’oublier pas votre radar de recul !
S’arrêter au bout de 90 secondes
Ce sont de longues secondes, mais les arbitres attendrons patiemment les 90 secondes pour s’assurer qu’à la fin du match votre robot reste immobile. Après le délais pour le tir du filet, il vérifieront probablement que tout vos actionneurs sont au repos. Coupez la commande des moteurs mais coupez aussi la consignes des servomoteurs !
Ils n’hésiterons pas à recommencer le test en plaçant un robot devant le votre au cours de match et à l’enlever après les 90 secondes. Évidemment votre robot ne doit pas repartir !
La chasse aux mammouths
12 mai 2014
Le déplacement du robot est presque au point, nous avons travaillé sur nos actionneurs. Nous présentons ici notre système de lances que nous espérons original.
Voici une petite vidéo :
Wifi et asservissement polaire
29 mars 2014
Voila deux mois que nous n’avions pas donné de nouvelles. Disons que notre robot nous occupait trop pour qu’on puisse écrire des articles.
Nous avons pas mal avancé sur la propulsion du robot. Chaque moteur est asservi en vitesse, la position du robot est estimée à partir du gyroscope (pour son orientation) et des codeurs des moteurs (pour l’avancement). Nous obtenons une position fiable tant que les roues ne glissent pas. Pour éviter les glissements, nous limitons les variations de consigne de vitesse en entrée de l’asservissement des moteurs. Pour atteindre la position souhaitée, nous avons eu la joie d’implémenter un asservissement polaire, tel que celui décrit par RCVA.
Ça semble bien marcher, mais comme nous n’avons pas bien fixé notre gyroscope, il nous faut délaisser la programmation au profit d’un peu de mécanique avant de valider tout ça.
Enfin, pour communiquer avec le robot lors de ses déplacements, nous avons configuré le Wi-Fi sur notre Raspberry Pi. Notre article détaille la configuration pour transformer un Raspberry Pi en point d’accès Wi-Fi.
Côté gyroscope, avec tout ce code qui a été rajouté, nous ne sommes plus capables de le lire toutes les 50 µs. Nous sommes tombés à 500 µs en espérant pouvoir à nouveau augmenter la fréquence de lecture une fois le reste du code terminé.
Mots clés : Essais, Programmation, Raspberry Pi
Testez 5 fois !
12 décembre 2013
Lorsque j’étais au club robotique de mon école, nos robots ne marchaient pas. Lorsque par hasard, l’un de nos essais marchait nous considérions cela comme suffisant et nous espérions avoir de la chance lors de l’homologation. Nous avons vécu de nombreux échecs formateurs puis, avec Poivron Robotique, j’ai essayé de faire des robots qui marchent.
Mais qu’est-ce qu’un robot qui marchent ? Il est toujours possible de se retrouver dans un cas où une défaillance imprévisible bloque le robot. Nous ne cherchons pas non plus à réaliser un robot parfait. Il est clair que les tests unitaires des actionneurs doivent marcher à tout les coups. Mais lorsqu’on en vient à tester la stratégie complète, de nombreux facteurs interviennent tels que l’éclairage du terrain, la position exacte de départ du robot ou les perturbations dans les ultrasons. De notre côté, nous tenons à nous assurer que notre robot fonctionne parfaitement au moins une fois sur deux.
La probabilité qu’une action, qui marche une fois sur deux, fonctionne 5 fois de suite avec succès est de 3%. Si nous faisons marcher notre robot 5 fois de suite avec succès, nous avons alors 97% de chance qu’il fonctionne plus d’une fois sur deux.
Bref, tant que vous n’arrivez pas à faire fonctionner votre truc avec succès 5 fois de suite, remettez-vous à l’ouvrage !
Mots clés : Essais
Administration du site