Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Pré-coupe CARAR et poster
23 avril 2022
Nous avons participé à la pré-coupe amicale de robotique Auvergne Rhône-Alpes (CARAR), l’occasion de rencontrer d’autres équipes et de passer un bon moment. Merci à Télécom Saint Étienne pour l’organisation !
Pour la CARAR, nous avons sommairement fixé notre écran avec une image fixe dessus. Ceci permettant, dans le meilleur des cas, d’augmenter notre score de 30%.

Affichage des points
Nous avons pu faire 4 matchs, notamment grâce à Arig qui a bien accepté de recommencer notre match. Voici la plus belle vidéo que nous ayons des matchs.
La vidéo est disponible en 720p ici (mp4 - 18 Mo).
Nous comptions 86 points, mais après l’évènement, nous avons relu le règlement et tous nos carrés de fouilles sont invalidés car nous retournons celui avec une croix rouge. Une mise à jour de la stratégie s’est vite imposée.
Le second enseignement nous vient de nos deux matchs contre Arig. Notre robot a détecté un obstacle (un coup l’arbitre, un coup le robot adverse) et n’est pas reparti. Ceci venant d’un bug maintenant corrigé.
Enfin, c’est le moment de réaliser le poster. L’occasion de baptiser le robot, ce sera "Capsicum", le robot qui garde le cap !

Poster Eurobot 2022
Mots clés : Coupe, Vidéo, Eurobot 2022, Photo, Poster
Avancement mi-novembre 2021
13 novembre 2021
Quoi de neuf ?
La reproduction du terrain
Nous ne ferons pas un terrain complet. Pas avant plusieurs mois en tout cas. Mais nous réalisons l’angle qui accueille la statuette ainsi que les échantillons qui se trouvent dessus.

Angle du terrain 2022
Le robot
Nous avons dépouillé notre ancien robot, il ne lui restait que la planche de base, les moteurs, le gyroscope et la carte électronique.

Robot tout nu
Nous nous faisons un petit plaisir, nous construisons un support mobile pour la carte électronique. La carte sera en position verticale pour un match, mais son support peut se mettre en position horizontale pour faciliter les branchements et les mesures.

Robot 2022 - carte électronique pliée
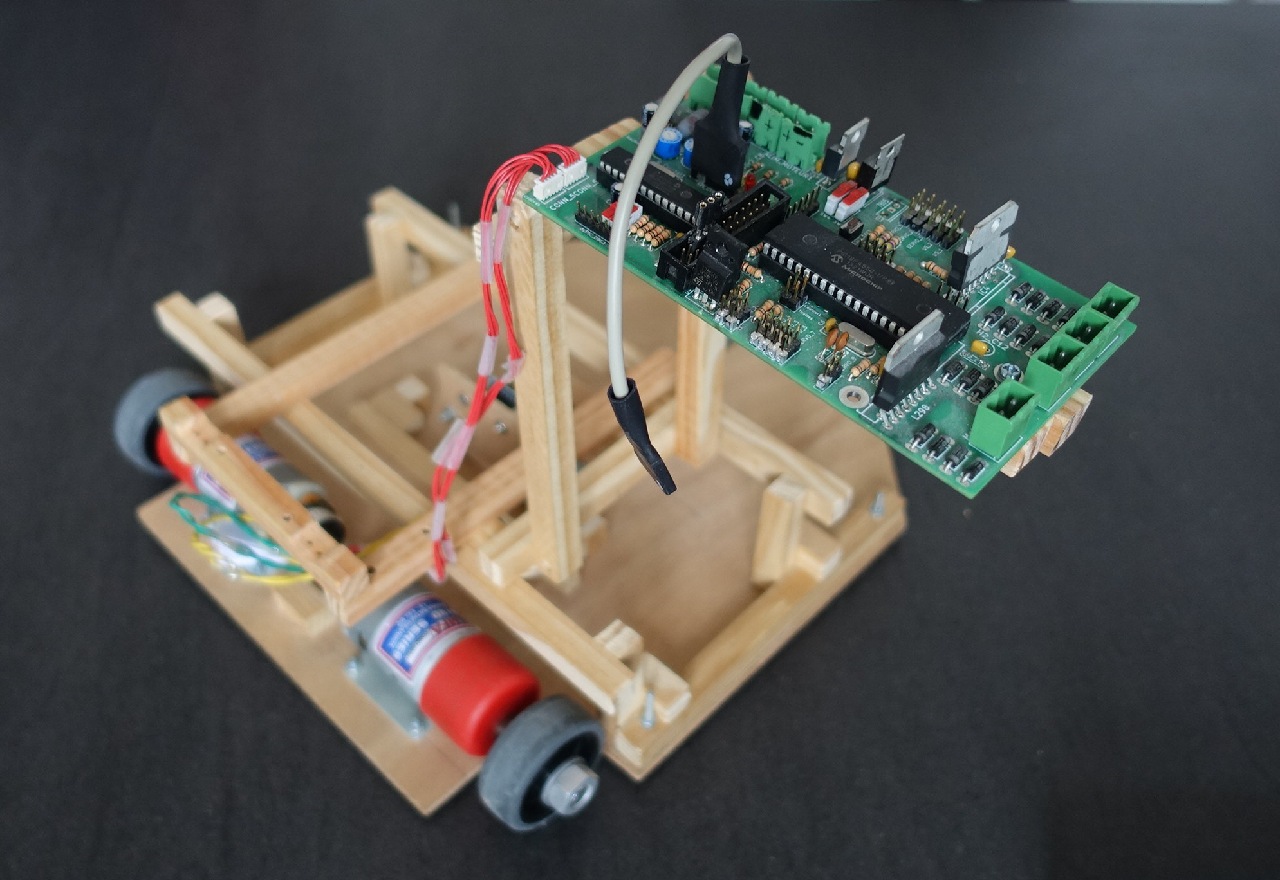
Robot 2022 - carte électronique dépliée
L’inconvénient, c’est que nous devons refaire tous nos câbles en plus longs. Et ça, ça va nous occuper un petit moment.

Robot 2022 - support carte électronique
Côté actionneurs, nous en avons commencés deux. Le premier pour attraper la statuette, le second pour déposer la réplique.
Actionneur de la statuette
Nous comptons sur du velcro pour attraper la statuette. Notre bras n’utilisera qu’un servomoteur pour attraper et déposer la statuette. Le bras est construit, mais il faut encore le fixer sur le robot.

Actionneur de la statuette
Actionneur de la réplique
Pour l’instant, nous n’avons mis en place que les deux contacteurs qui nous indiqueront le bon positionnement du robot. Avec deux contacteurs, si le robot n’est pas bien positionné, il est possible de savoir de quel côté il doit se décaler. Nous avions utilisé un système similaire en 2012 pour accoster les totems qui contenaient les lingots.
Et la suite ?
Tout d’abord, nous devons finir nos câbles puis l’actionneur de la réplique. Ce sera probablement l’occasion pour le robot de faire quelques tours de roues, pour s’assurer que nous arrivons à déposer la réplique.
Ensuite, il faudra positionner l’actionneur de la statuette.
Ce qu’on se garde pour plus tard
Et oui, nous sommes loin d’avoir fini. Voici, en vrac, ce qu’il nous faudra réaliser :
- Le positionnement des capteurs d’évitement.
- la réalisation de la vitrine
- le mat balise
- le bras latéral pour retourner les carrés de fouille
- tester, tester, et ... tester !
Bref, ce n’est pas fini, loin de là !
Mots clés : Coupe, Mécanique, Eurobot 2022, Photo
Eurobot 2022
24 octobre 2021
Règlement officiel
Ça y est, le règlement officiel est sorti ! Vous pouvez le trouver sur le site de coupederobotique.fr, plus précisément ici.
Le forum pour discuter du règlement, voir les questions posées sur la version bêta est là.
Enfin, le forum pour discuter de la compétitions, présenter l’avancement des robots et autres se trouve ici.
Portail des équipes
Nous relançons le portail des équipes, disponible ici : http://poivron-robotique.fr/planet. Vous souhaitez apparaitre sur le portail, envoyez-nous un message !
Notre participation
De notre côte, même si tout n’est pas réglé, nous devrions participer à l’édition de cette année.
Nous avons reproduit quelques éléments de jeux et un petit bout de terrain.
Nous avons défini notre stratégie, avec un seul robot pour l’instant. Nous nous concentrons sur les actions simples et ferons un second robot si c’est trop facile (mais nous en doutons fortement).
Pour l’instant, notre stratégie est la suivante :
- Faire tomber les deux échantillons de l’abri de chantier et les pousser sous l’abri
- Prendre la statuette
- Déposer la réplique
- Déposer la statuette dans la vitrine
- Découvrir les carrés de fouille
- Rentrer dans la zone de départ
Si nous tenons notre contrat, nous devrions faire un bon paquet de point, mais clairement sans viser les premières places.
Le Wiki
Enfin, Planète Sciences/Eurobot a tenté de mettre un wiki à disposition des équipes. Nous avons apporté notre part et continuerons probablement d’y contribuer un peu au cours de l’année. Vous le trouverez à cette adresse : https://www.eurobot.org/wiki/fr/home. N’hésitez pas à le compléter !
Mots clés : Coupe, Eurobot 2022
Et alors, cette coupe ? (Partie 1)
18 juin 2015
Voici plus d’un mois que la coupe de France de Robotique s’est terminée et vous n’avez pas eu de nos nouvelles. Ça s’est globalement bien passé !
Arrivés vers 13h, nous franchissons la porte d’entrée vers 16h30 et nous homologuons nos deux robot à 17h32.
Match 1
Nos deux robots ont besoin de communiquer. Ils ne s’échangent qu’un seul message dans le match, ce message indique au petit robot qu’il est face aux marches et qu’il peut quitter le gros robot. Pour ce premier match, ce sont des DELs qui envoient un signal au petit robot. Suspectant que les spots de la coupe pourraient perturber le capteur, nous profitons des 3 minutes de préparation pour faire un essai. Le petit robot ne sort pas du grand, nous décidons de ne pas poser le petit robot sur la table pour ce match.
Le robot recouvre 3 marches avec deux tapis (6 points) et va abattre un clap (5 points). Pour nos adversaires, le match est catastrophique, la tirette de le petit robot (qui se trouve devant leur gros robot) se casse. Laissant le petit robot inactif et le gros coincé derrière le petit.
C’est une victoire, pas très glorieuse, mais avec nos 16 points (11 + 5 point de participation) nous nous classons à la 35e place.
Un pas vers l’homologation
19 avril 2015
Alors que certaines équipes nous donnent de leurs nouvelles depuis la coupe de Belgique, nous avançons à petit pas vers l’homologation.
Le code a été ré-organisé. Notre fichier Strategie.c a été découpé en deux (Strategie.c et Strategie2014.c) avec les fichiers d’entête correspondant. Le fichier Strategie2015.c a été créer et quelques bouts de code ont du être déplacé de la partie générique vers les fichiers Strategie2014.c et Strategie2015.c. Ce travail n’est pas tout à fait terminé.
Cependant, à l’heure actuelle, nous avons pu tester notre ébauche de code d’homologation. Petit pois recule et rentre dans Gousse. Gousse, notre gros robot, quitte sa zone de départ, se positionne devant les marches et émet un signal. Petit pois s’attaque alors aux marches et devrait s’arrêter en haut.
C’est un grand soulagement de ne pas avoir rencontré de soucis majeurs. Replonger dans notre code n’aurait pas été une partie de plaisir même s’il est censé être relativement propre.
Seule frayeur, un servomoteur semblait être commandé épisodiquement. Ce n’était qu’une défaillance du servomoteur. Décidément, ces petits HS-55 ne sont pas très fiables !
Administration du site