Gyroscope opérationnel !
27 janvier 2014
Nous avons eu un peu de mal, mais nous avons enfin un gyroscope opérationnel !
Nous récupérons une valeur toutes les 50 µs, ce qui est énorme comparé à notre précédent gyroscope. Nous n’étions qu’à 4 ms. Ceci nous permettra de garder un angle précis même lors de petits chocs !
Concernant le reste de la carte électronique, il reste encore un peu de travail. Nous avons passé beaucoup de temps sur les protocoles de communication. Ceci nous permet de déboguer plus facilement notre code. C’est ainsi que nous avons fini par comprendre que notre code était bon et que malgré la fiche technique de notre gyroscope (ADXRS453) il fallait le calibrer.
Un petit schéma de ce qui nous reste à faire :
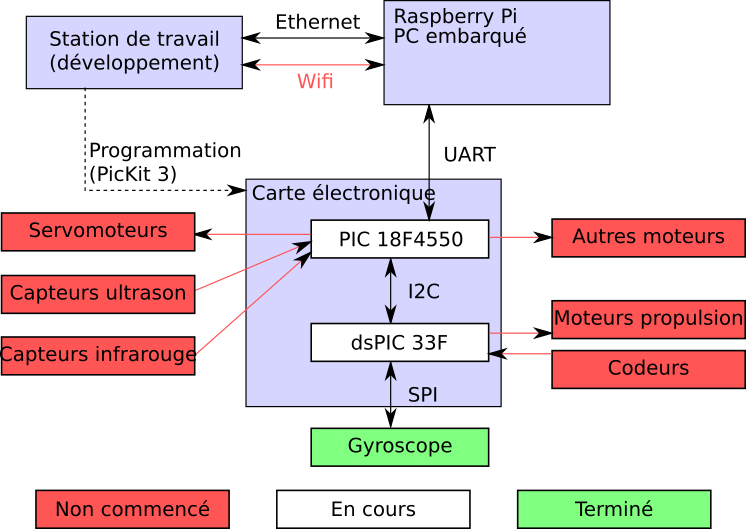
Architecture électronique
Ça a l’air énorme, mais le gros du travail se trouve autour des moteurs de propulsion et des codeurs. Nous avions déjà codés la gestion des servomoteurs et des capteurs ultrason sur un microcontrôleur quasi-identique les années précédentes. Si tout se passe comme pour l’I2C, ajouter la gestion des capteurs et des servomoteurs devrait nous prendre une petite semaine.
Enfin dernier point qui nous cause du soucis : nous n’avons pas encore alimenté la partie puissance de notre carte. C’est à ce moment là que nous risquons de causer de dégâts !
Commentaires
Il n'y a pas de commentairesAjouter un commentaire
Administration du site