Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Règlement 2023 et notre programme
16 septembre 2022
Le brouillon du règlement de la coupe est disponible, sur le site de la coupe de France de robotique. Cela fait donc une semaine que nous réfléchissons activement au règlement.
C’est un règlement à l’opposée de celui de l’an dernier, avec une table presque sans obstacle qui incite à avoir des robots qui se déplace bien, voire très bien sur le terrain !
Alors, en attendant la version finale du règlement - la FAQ peut vous indiquer dans quel sens évolue le règlement - nous ébauchons nos robots.
Cette année nous sommes très tentés d’avoir deux robots. Le premier sera basé sur notre architecture de 2014 et sera chargé de marquer les points avec les gâteaux. Le second robot sera bien différent du premier et s’occupera des cerises. Voici ce que nous avons en tête avec les principales étapes du projet.
Robot des gâteaux
Basé sur le robot historique, nous réutiliserons les roues, les moteurs, le gyroscope et notre magnifique carte électronique maison. Il embarquera les 10 cerises du départ, devra pousser et tirer les gâteaux dans les assiettes et leur déposer une cerise dessus. Voici notre programme (pas forcément dans l’ordre) :
- Programmation : gérer les accélérations et décélération au niveau des trajectoires
- Programmation : Arrêt de l’asservissement en cas d’erreur trop grande
- Mécanique : actionneur pour prendre une cerise du réservoir du robot et la déposer sur un gâteau
- Mécanique : refaire le châssis, diminuer le périmètre non-déployé
- Programmation - optionnel : Gérer la stratégie haut niveau avec le Raspberry Pi
Robot des cerises
Nous partons de zéro pour ce robot. Pour la localisation, nous tentons de rester sur l’architecture qui nous a si bien réussi : des codeurs sur les moteurs. Pour le reste, l’objectif est de changer un peu des technologies utilisées depuis 2014 sur nos robots. Ce sera donc un robot holonome, d’un diamètre modeste (nous visons 25cm). Le cœur de l’électronique sera un Raspberry Pi Pico et pour le pilotage des moteurs, nous hésitons entre des LMD18200 ou des modules de type Pololu. Sur ce robot, notre programme est très chargé :
- Mécanique : base roulante holonome
- Mécanique : intégration de l’électronique
- Mécanique : intégration de la batterie
- Électronique : prototypage sur plaque de test pour valider les capteurs/actionneurs
- Électronique : conception de la carte
- Programmation : lecture du gyroscope à partir du RPI Pico
- Programmation : lecture des capteurs de couleur à partir du RPI Pico
- Programmation : lecture des codeurs à partir du RPI Pico
- Programmation : portage du code des servomoteurs (ou utilisation des PWM ?)
- Programmation : portage des codes de déplacement sur RPI Pico (asservissement, construction des trajectoires, accélération et décélération, arrêt sur erreur trop grande)
- Divers : système de préhension et de dépose des cerises
- Divers : système d’évitement.
En gros
Un programme bien (trop ?) chargé. Alors nous essayons de ne pas trop traîner, nous avançons bien côté shopping. Nous espérons avoir fini de commander les composants nécessaire à la nouvelle roulante ce week-end. Ensuite, nous nous focaliserons sur le RPI Pico...
Mots clés : Conception, Coupe, Odométrie, Robot holonome, 2023
Analyse cinematique d’un robot holonome
4 septembre 2022
Toujours pas de maquette d’un robot holonome en vue (même si nous avons retrouvé nos pièces), mais voici la présentation de la cinématique d’un robot holonome. Le raisonnement a été le suivant :
Nous pouvons connaître la rotation de nos moteurs, donc la composante selon un axe de la vitesse des roues. Pouvions-nous, à partir de ces vitesses déterminer la vitesse du robot ? C’est notre premier article.
Puisque c’est possible, exprimons ces vitesses. c’est le sujet du deuxième article.
Maintenant que nous pouvons connaître le déplacement du robot à partir des vitesses des roues, pouvions-nous faire l’inverse ? Trouver comment commander les trois moteurs en fonction d’un mouvement souhaité ? C’est notre 3ᵉ article !
Le tout est rangé dans "Nos études", bonne lecture !
Mots clés : Mécanique, Robot holonome, 2023
Robot holonome
2 septembre 2022
Nous n’avons toujours pas avancé sur la réalisation de la maquette du robot holonome. Cependant nous travaillons sur un potentiel robot holonome. L’un des points compliqués du robot holonome est de connaître sa position.
Sur un robot différentiel, l’utilisation de roues codeuses indépendantes donne de bons résultats (sur une sol plat). La solution utilisée sur nos robot dérive de celle-ci, avec un gyroscope et des codeurs à l’arrière des moteurs de propulsion. C’est cette solution que nous essayons d’appliquer à un robot holonome. Mais dans ce cas, les relations entre les vitesses des moteurs et la vitesse du robot est un peu plus compliquée.
Si vous êtes prêt pour un voyage avec de la trigonométrie, des tenseurs cinématiques et des matrices, voici notre article qui se penche sur le sujet.
Mots clés : Mécanique, Robot holonome, 2023
Les activités de l’été 2022
21 août 2022
Après la coupe, c’est souvent calme. Il a fallu rentrer, ranger, ranger et ranger. Nous avons passé un peu de temps à préparer les articles et les vidéos de nos matchs et toute la vie quotidienne qui nous avions laissée en suspend revient... Bref, il a bien fallu deux mois avant de pouvoir recommencer un peu de robotique.
Dans les dates importantes à venir, il y a la présentation du règlement Eurobot 2023, le 10 septembre 2022. Vous avez quelques informations sur le site CoupeDeRobotique.fr et le lien de la diffusion sur Youtube, ici.
D’un point de vue plus local, nous espérons avoir un stand au forum des associations de la ville de Riom, qui aura lieu le 4 septembre. En prévision de cet évènement, nous préparons quelques démonstrateurs.
Le plus abouti est celui pour le pont en H. L’idée c’est d’avoir d’un côté un moteur avec une pile, où les gens peuvent constater que la moteur change de sens de rotation en fonction de la polarité. De l’autre, d’avoir ce démonstrateur qui a deux modes de fonctionnement :
- Sans moteur branché, il est possible d’appuyer sur tous les boutons sans créer de court-circuit et de voir la propagation de la tension.
- Avec le moteur, (malheureusement sans protection), où en appuyant sur les bons boutons, il est possible de piloter le moteur dans les deux sens.
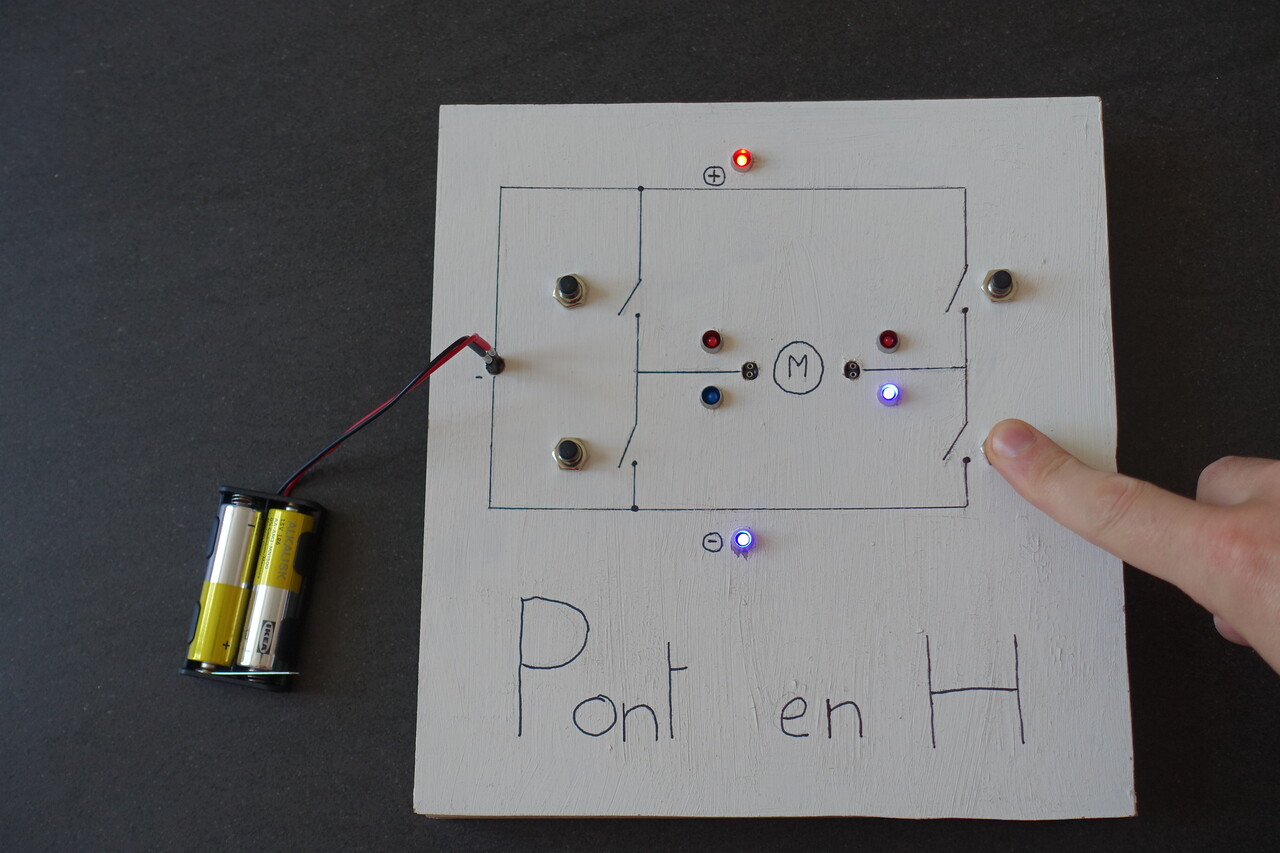
Demonstrateur "Pont en H"
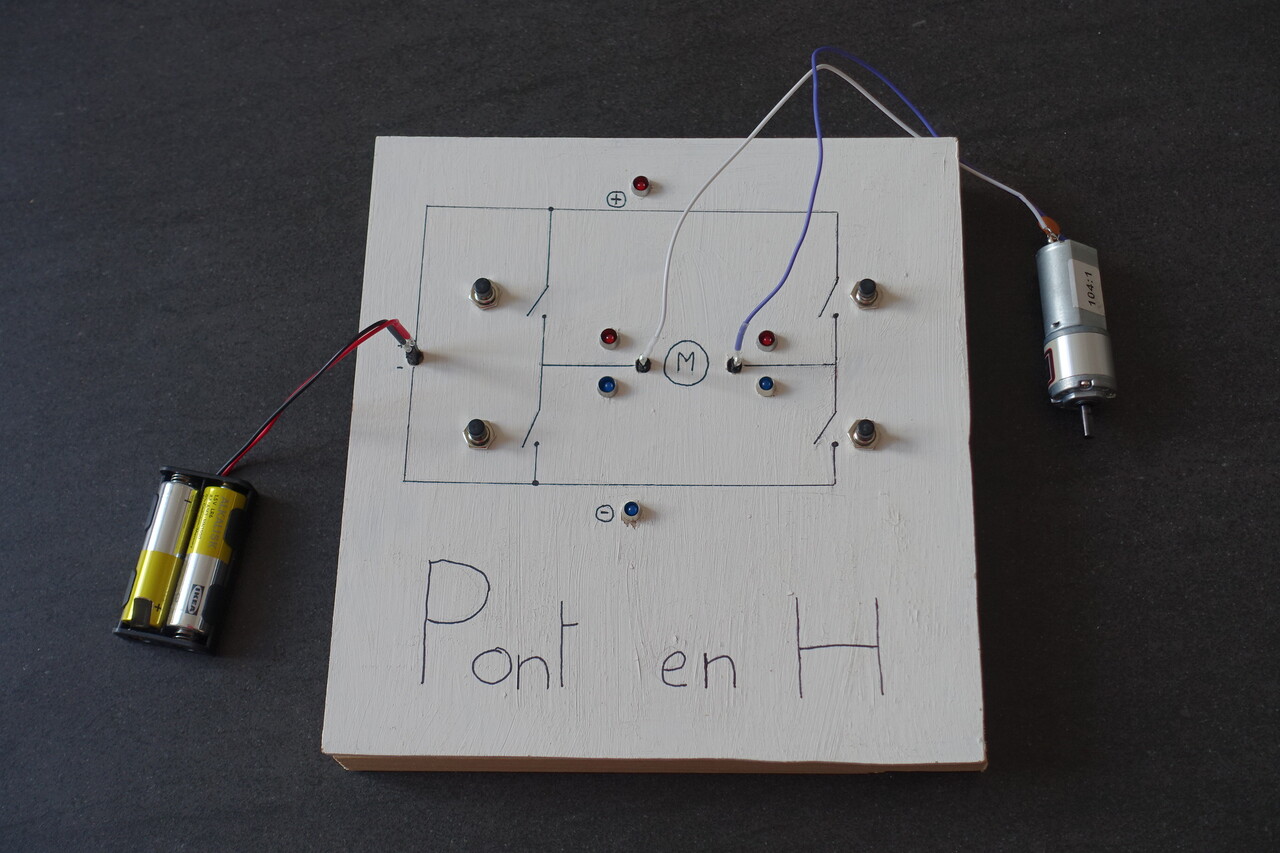
Démonstrateur "Pont en H" avec le moteur
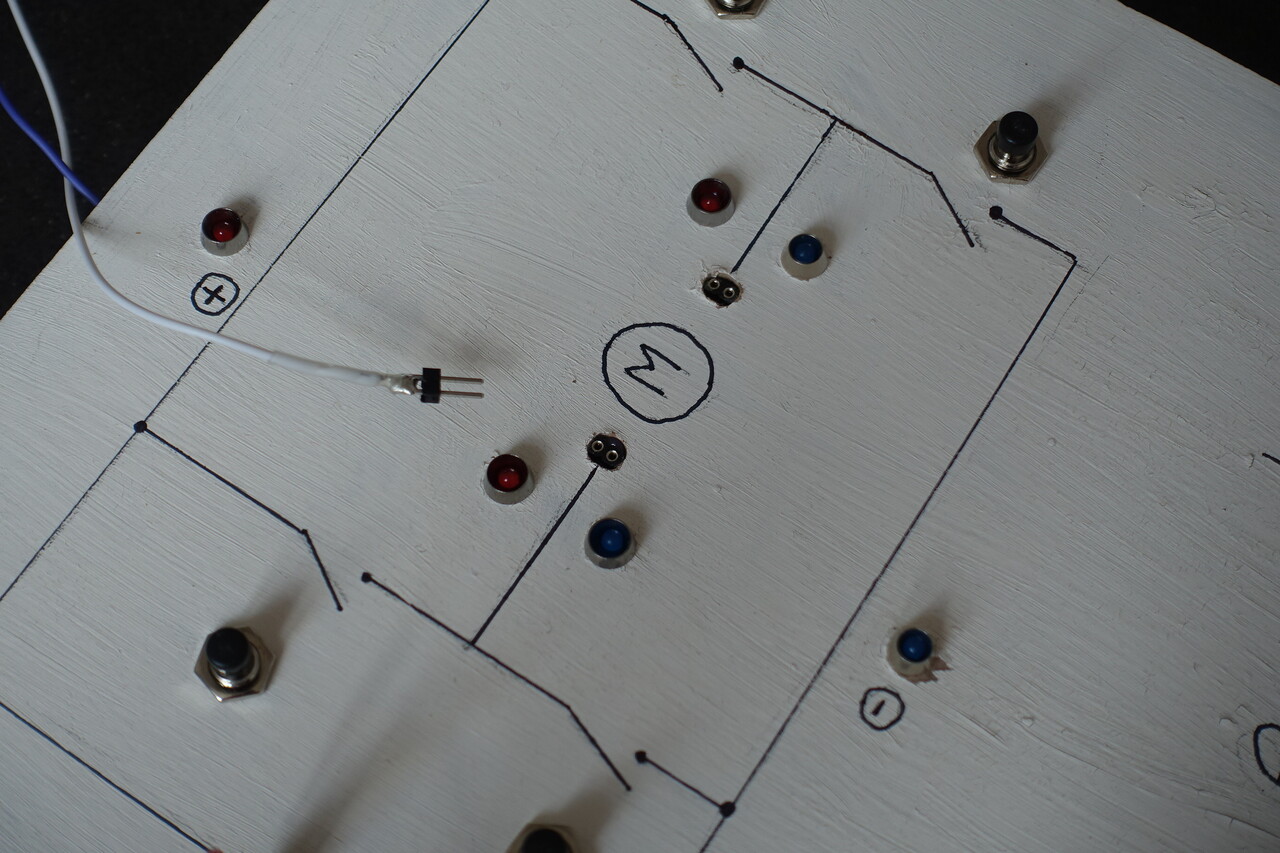
L’actuce pour éviter les court-circuit à vide.
Nous prévoyons également deux châssis avec des roues, pour présenter les problèmes de cinématique. Mais ce sera probablement l’objet d’un autre petit article.

C’est quoi ?
Mots clés : Électronique, Photo, Robot holonome, Pedagogique
page précédente 1 2 3 page suivante
Administration du site