Avancement mi-novembre 2021
13 novembre 2021
Quoi de neuf ?
La reproduction du terrain
Nous ne ferons pas un terrain complet. Pas avant plusieurs mois en tout cas. Mais nous réalisons l’angle qui accueille la statuette ainsi que les échantillons qui se trouvent dessus.

Angle du terrain 2022
Le robot
Nous avons dépouillé notre ancien robot, il ne lui restait que la planche de base, les moteurs, le gyroscope et la carte électronique.

Robot tout nu
Nous nous faisons un petit plaisir, nous construisons un support mobile pour la carte électronique. La carte sera en position verticale pour un match, mais son support peut se mettre en position horizontale pour faciliter les branchements et les mesures.

Robot 2022 - carte électronique pliée
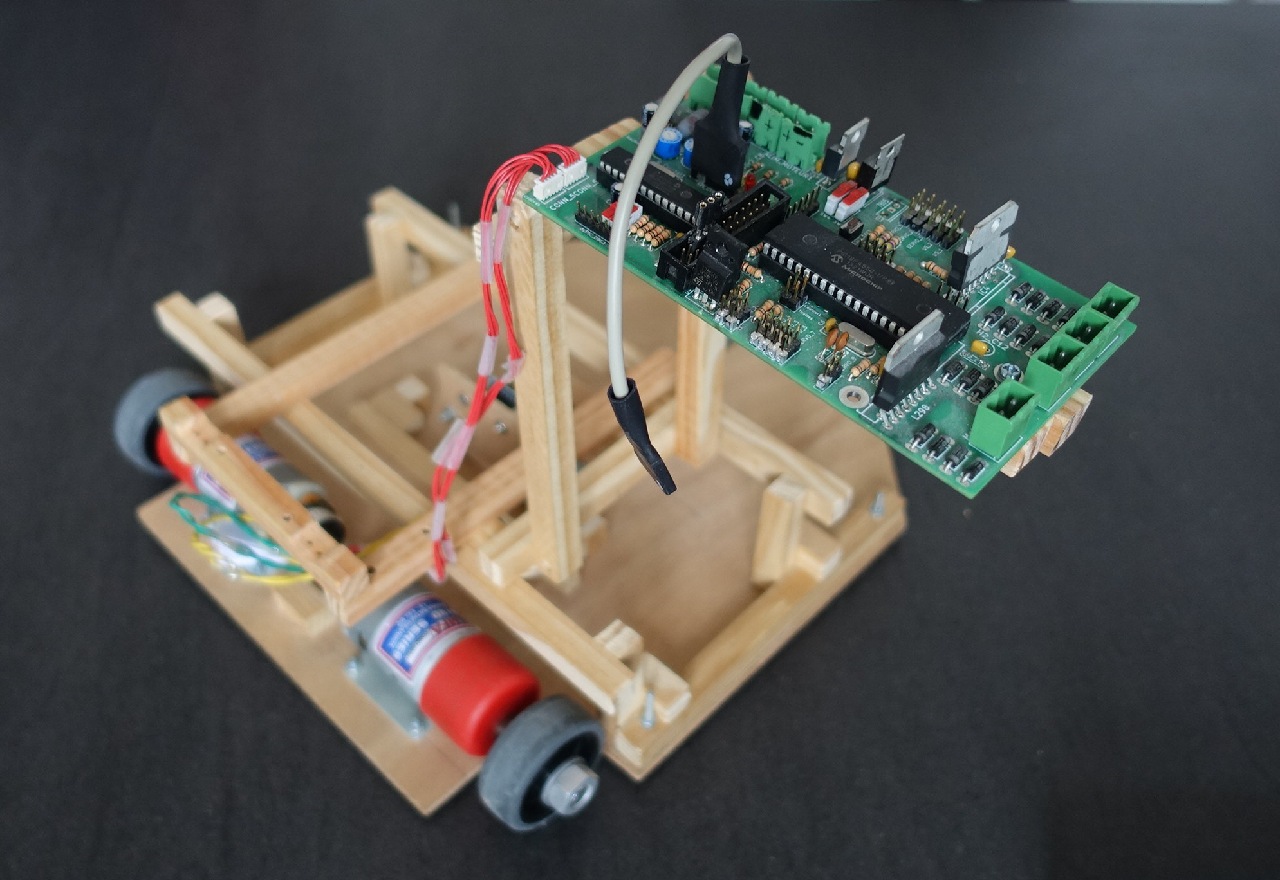
Robot 2022 - carte électronique dépliée
L’inconvénient, c’est que nous devons refaire tous nos câbles en plus longs. Et ça, ça va nous occuper un petit moment.

Robot 2022 - support carte électronique
Côté actionneurs, nous en avons commencés deux. Le premier pour attraper la statuette, le second pour déposer la réplique.
Actionneur de la statuette
Nous comptons sur du velcro pour attraper la statuette. Notre bras n’utilisera qu’un servomoteur pour attraper et déposer la statuette. Le bras est construit, mais il faut encore le fixer sur le robot.

Actionneur de la statuette
Actionneur de la réplique
Pour l’instant, nous n’avons mis en place que les deux contacteurs qui nous indiqueront le bon positionnement du robot. Avec deux contacteurs, si le robot n’est pas bien positionné, il est possible de savoir de quel côté il doit se décaler. Nous avions utilisé un système similaire en 2012 pour accoster les totems qui contenaient les lingots.
Et la suite ?
Tout d’abord, nous devons finir nos câbles puis l’actionneur de la réplique. Ce sera probablement l’occasion pour le robot de faire quelques tours de roues, pour s’assurer que nous arrivons à déposer la réplique.
Ensuite, il faudra positionner l’actionneur de la statuette.
Ce qu’on se garde pour plus tard
Et oui, nous sommes loin d’avoir fini. Voici, en vrac, ce qu’il nous faudra réaliser :
- Le positionnement des capteurs d’évitement.
- la réalisation de la vitrine
- le mat balise
- le bras latéral pour retourner les carrés de fouille
- tester, tester, et ... tester !
Bref, ce n’est pas fini, loin de là !
Commentaires
Il n'y a pas de commentairesAjouter un commentaire
Administration du site