Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
Raspberry Pi Pico : de la documentation !
1er janvier 2023
Bonne année à vous tous, chères lectrices, chers lecteurs !
Quoi de neuf depuis le 11 décembre de l’an dernier ?
Globalement, pas grand chose sur le robot.
Nous avons séparé le code de test du fichier principal.
Nous avons commencé les travaux sur l’I2C et perdu beaucoup de temps car notre puce TCA9535 ne répond pas. Nous avons vérifier les connexions électriques, vérifié les tensions, changé la puce, rien n’y fait. La seconde puce est-elle grillée ? La carte était-elle mal conçue ? Pour l’instant, nous ne le savons pas !
Du coup, nous nous sommes rabattus sur le 2e Raspberry Pi Pico pour travailler l’I2C. Ça a été l’occasion de mettre au propre nos notes sur la création d’un projet pour le Raspberry Pi Pico :
- Où trouver la documentation
- Installer l’environnement de développement (sur Debian)
- Créer son projet
Et de découvrir cette librairie pico_i2c_slave qui fait exactement ce que nous voulions côté esclave.
Enfin, nous avons recommencé nos moulages en papier mâché, pour l’aspiration des balles.
Lors de notre dernière news, nous avons présenté des courbes avec des accélérations et des décélérations. C’est le résultat d’un article écrit en septembre dernier que vous trouverez ici.
La suite :
- Ecrire notre mémo sur l’utilisation de VSCode avec le Raspberry Pi Pico
- Finaliser le code i2c non bloquant
- Reprendre les tests avec la turbine
- Placer des contacteurs sur le robot pour détecter les bordures
- Longer les bordures
- Transformer la base roulante en robot :
- Fixer la carte électronique
- Installer le mat balise
- Intégrer la turbine
- Améliorer la détection de l’adversaire
Mots clés : I2C, Programmation, 2023, Raspberry Pi Pico
Avancées logicielles - Le déplacement avance !
11 décembre 2022
Par rapport à nos nouvelles du 2 décembre 2022, nous avons bien avancé sur la programmation des déplacements ! À ce niveau, le dernier point encore non maîtrisé est l’utilisation du gyroscope pour se positionner.
Nous avons publié notre code sur Github avec un Readme qui explique la structure du code.
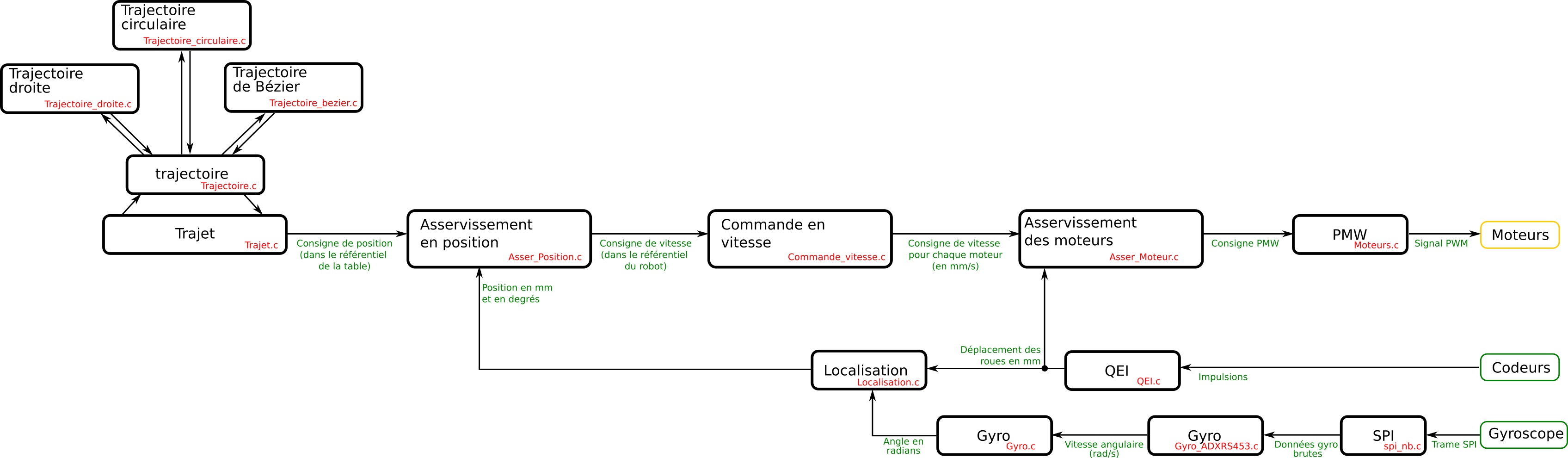
Architecture logicielle des déplacements
Pour l’instant, nous n’avons pas de belle vidéo à présenter, mais ça ne saurait tarder... Pour patienter, un test "en boucle ouverte", seuls les moteurs sont asservis en vitesse, il n’y a pas de retour sur la position du robot !
Et voici les courbes obtenues lors des essais de contrôle en vitesse avec une accélération et une décélération - ce sont bien des courbes expérimentales :

Le code supporte les trajectoires droites, circulaires ou suivant les courbes de Bézier.
Donc nous sommes - presque - prêts à nous déplacer avec classe et précision !
Mots clés : Programmation, Vidéo, Robot holonome, 2023, Raspberry Pi Pico
Carte Holonome 2023 - Enfin soudée !
2 décembre 2022
Nous vous avions présenté la carte nue, la documentation interactive de la carte mais pas la carte soudée ! Il lui manque bien un ou deux connecteur, mais la voici :

Carte Holonome 2023 soudée
Mots clés : Électronique, Photo, Robot holonome, 2023, Raspberry Pi Pico
Codeurs et asservissement des moteurs
29 novembre 2022
Ce week-end, nous avons changé le châssis en medium 3 mm (cassé) par un châssis en contre plaqué de 5 mm. En démontant les moteurs nous en avons profité pour installer les codeurs à l’arrière des moteurs. En effet, nos moteurs sont équipés d’un axe arrière dédié à la fixation d’un codeur.
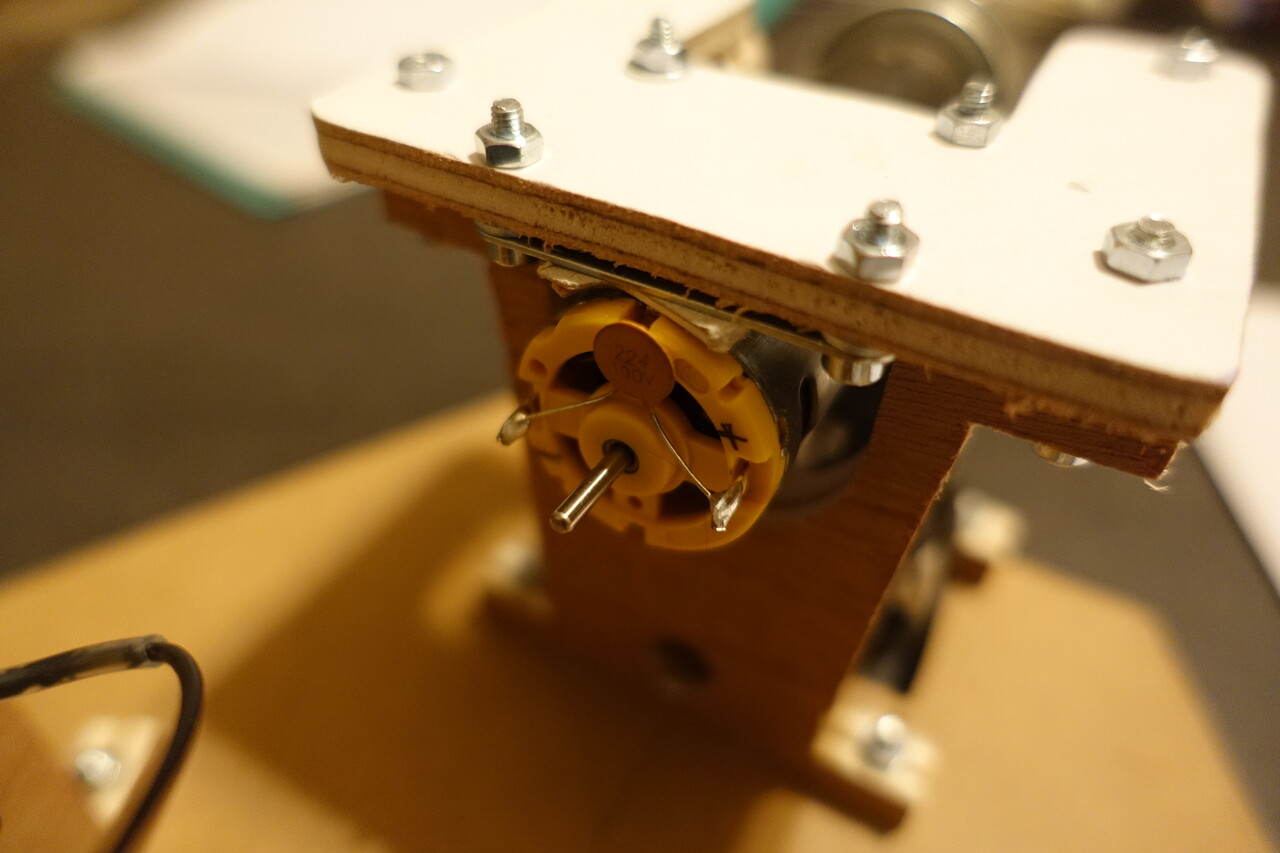
Axe arrière du moteur
C’est sur cet axe arrière que nous fixons notre codeur en kit.
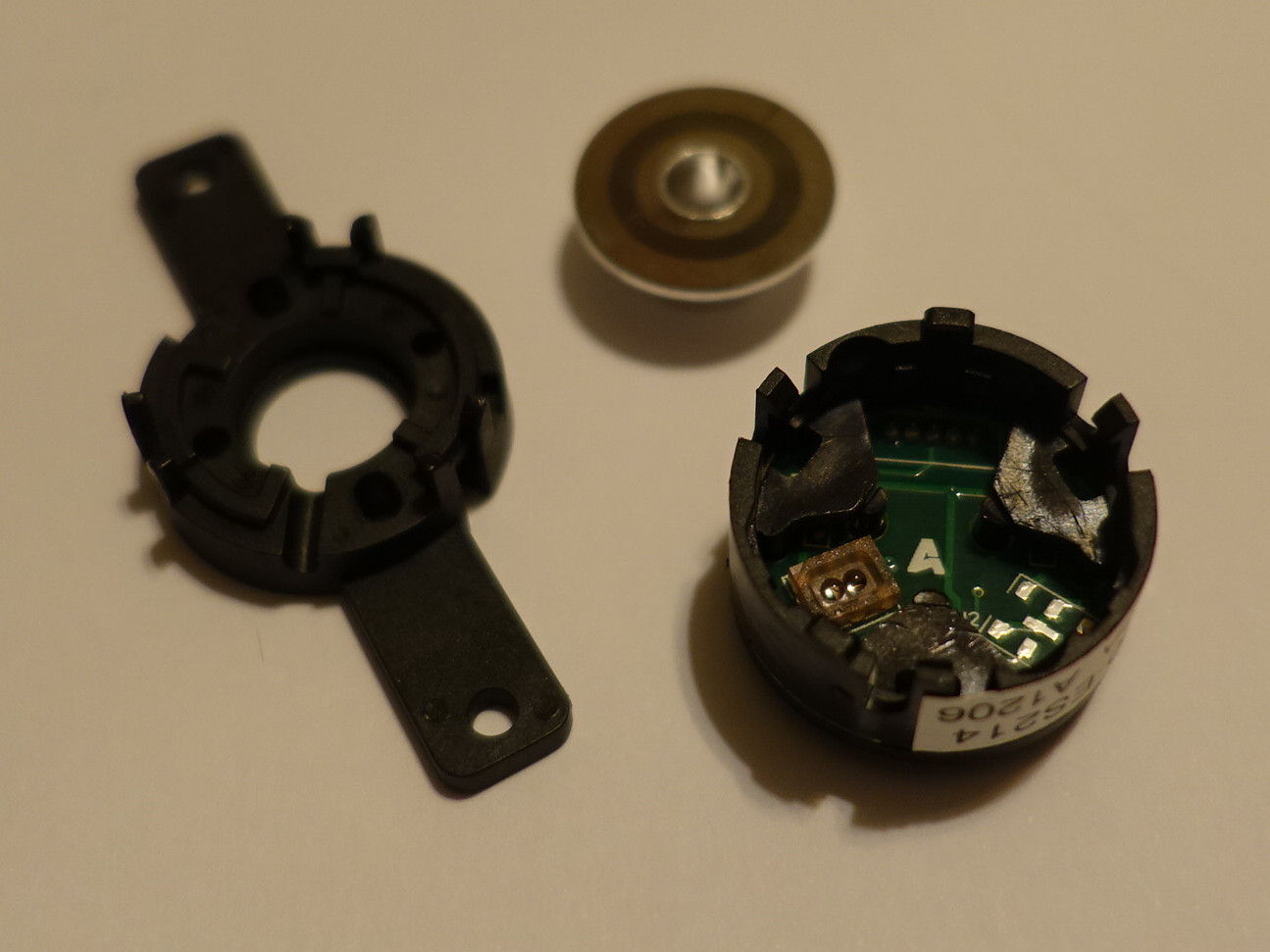
Codeur en kit
Pour ceux qui ne connaissent pas trop le fonctionnement de la roue codeuse, il s’agit d’une petite diode qui va éclairer un disque strié. Un récepteur va détecter la variation de lumière due aux stries et ainsi compter le passage des stries. En ajoutant un léger décalage avec un second capteur, il est possible de déterminer le sens de rotation du disque. Quelques informations supplémentaire par ici.
Voici notre disque en détail, c’est quand même une jolie pièce !

Disque du codeur
Une fois l’ensemble tout remonté, nous revérifions que la lecture des codeurs et le pilotage des moteurs fonctionnent bien. Une petite surprise nous attendait sur le moteur 3, un court-circuit maintenait la broche PWM à la masse...
Bref, le robot était presque prêt à faire ses premiers tours de roue. Dernière étape avant un déplacement sommaire, l’asservissement des moteurs.
Asservissement des moteurs
Voici notre démarche pour régler notre asservissement. Notez qu’il s’agit d’un processus itératif et que nous nous arrêtons dès que le résultat nous semble correct. Nous ne sommes pas allés chercher l’optimisation !
Pour nos essais, nous fixons une consigne à 500 mm/s et un gain P arbitraire.
Réglage initial
L’oscillation montre un gain trop fort. Nous le divisons par 2.
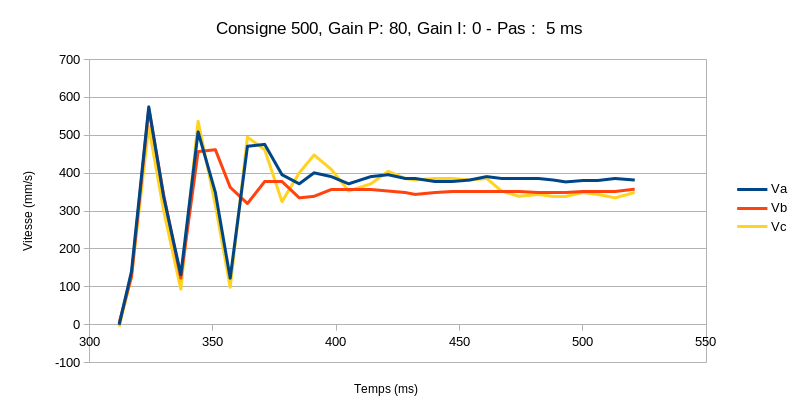
Première réduction du gain
Observons la valeur finale, de 350 à 400 mm/s. Nous ajoutons un intégrateur pour améliorer la précision de l’asservissement.
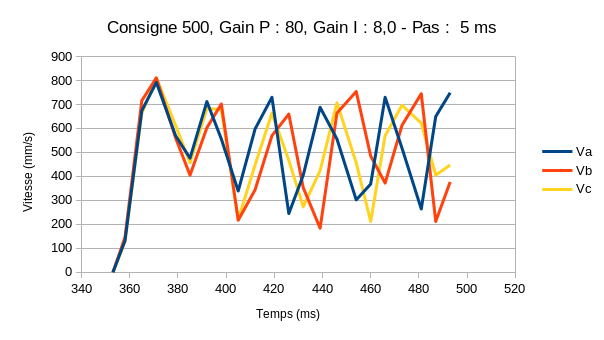
Ajout de l’intégrateur
Nous sommes plus près de 500 mm/s, mais ça oscille énormément. Nous divisons par 10 le gain de l’intégrateur.
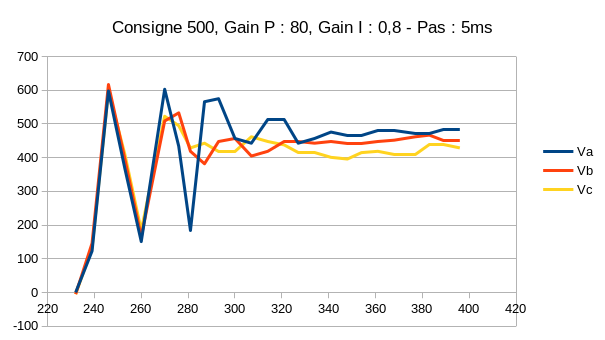
Diminution de l’intégrateur
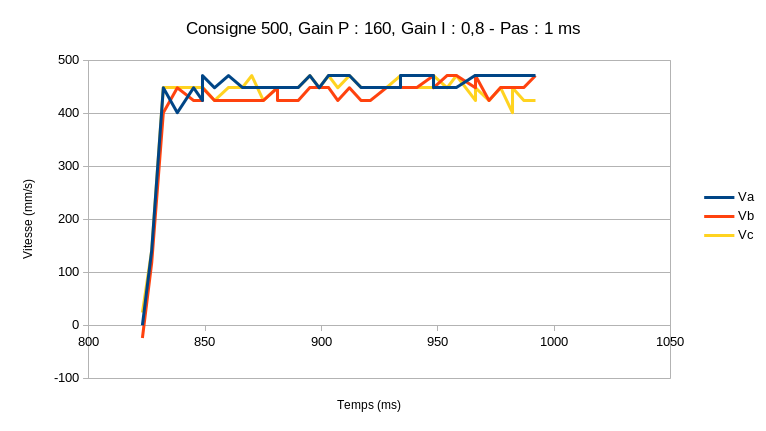
Le début semble encore bien oscillant. Nous savons que la période de calcul influe grandement sur la stabilité d’un système. Nous la diminuons de 5 millisecondes à 1 milliseconde. Les résultats sont flagrants.
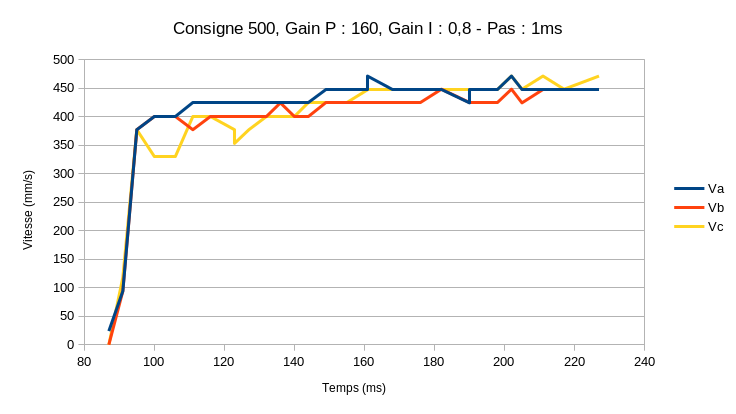
Réudction du pas de temps
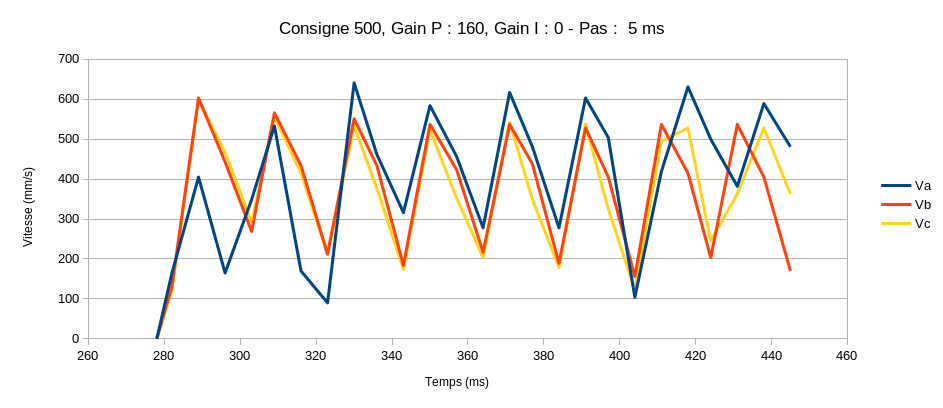
La montée brusque suivie de l’atteinte de la valeur finale par une montée bien plus lente laisse supposer que notre gain proportionnel (P) est trop faible par rapport à notre gain d’intégration (I). Ayant gagné en stabilité en réduisant le pas de calcul, nous pouvons augmenter le gain P (en le doublant).
ré-augmentation du gain P
En conclusion, nous noterons que nous obtenons des résultats très corrects sans peaufiner les gains. Nos principaux ajustements ont été de multiplier ou diviser par 2, 5 ou 10 les gains.
Mots clés : Essais, Photo, Robot holonome, 2023
Stand à la médiathèque de Riom (RLV)
20 novembre 2022
Nous étions ce samedi à la médiathèque de Riom et vous avez été assez nombreux à vous arrêter sur notre stand, merci à vous !
En plus d’avoir le plaisir de partager nos travaux avec vous, nous étions aussi là pour recruter des membres, soit pour notre équipe actuelle, soit pour monter une nouvelle équipe junior.
Concentré sur nos créations, nous avons donné assez peu d’information sur le concours en lui-même. Le site du concours, la coupe de France de Robotique est ici www.coupederobotique.fr. Les dates des concours sont :
- le 18 mars 2023 à Lyon pour la coupe régionale Junior
- du 17 au 20 mai 2023 à la Roche-sur-Yon pour la compétition adulte et les finales Junior.
Sur le site vous trouverez également le règlement qui décrit les contraintes des robots, le terrain et les actions qui permettent de marquer des points.
Si vous souhaitez rejoindre l’aventure, envoyez-nous un message à l’aide du formulaire contact du site en nous laissant vos coordonnées !
page précédente 1 ... 5 6 7 8 9 10 11 12 13 ... 37 page suivante
Administration du site