Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Les activités de l’été 2022
21 août 2022
Après la coupe, c’est souvent calme. Il a fallu rentrer, ranger, ranger et ranger. Nous avons passé un peu de temps à préparer les articles et les vidéos de nos matchs et toute la vie quotidienne qui nous avions laissée en suspend revient... Bref, il a bien fallu deux mois avant de pouvoir recommencer un peu de robotique.
Dans les dates importantes à venir, il y a la présentation du règlement Eurobot 2023, le 10 septembre 2022. Vous avez quelques informations sur le site CoupeDeRobotique.fr et le lien de la diffusion sur Youtube, ici.
D’un point de vue plus local, nous espérons avoir un stand au forum des associations de la ville de Riom, qui aura lieu le 4 septembre. En prévision de cet évènement, nous préparons quelques démonstrateurs.
Le plus abouti est celui pour le pont en H. L’idée c’est d’avoir d’un côté un moteur avec une pile, où les gens peuvent constater que la moteur change de sens de rotation en fonction de la polarité. De l’autre, d’avoir ce démonstrateur qui a deux modes de fonctionnement :
- Sans moteur branché, il est possible d’appuyer sur tous les boutons sans créer de court-circuit et de voir la propagation de la tension.
- Avec le moteur, (malheureusement sans protection), où en appuyant sur les bons boutons, il est possible de piloter le moteur dans les deux sens.
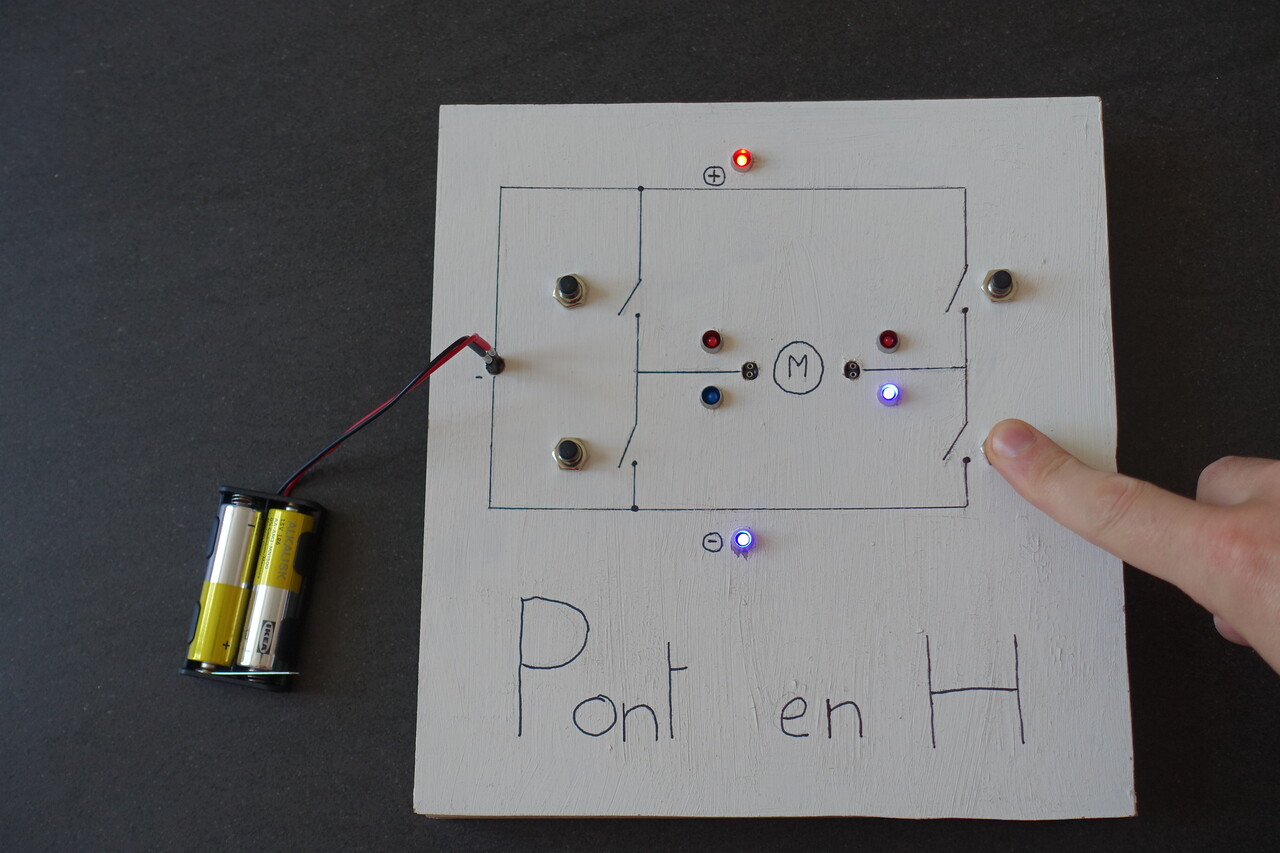
Demonstrateur "Pont en H"
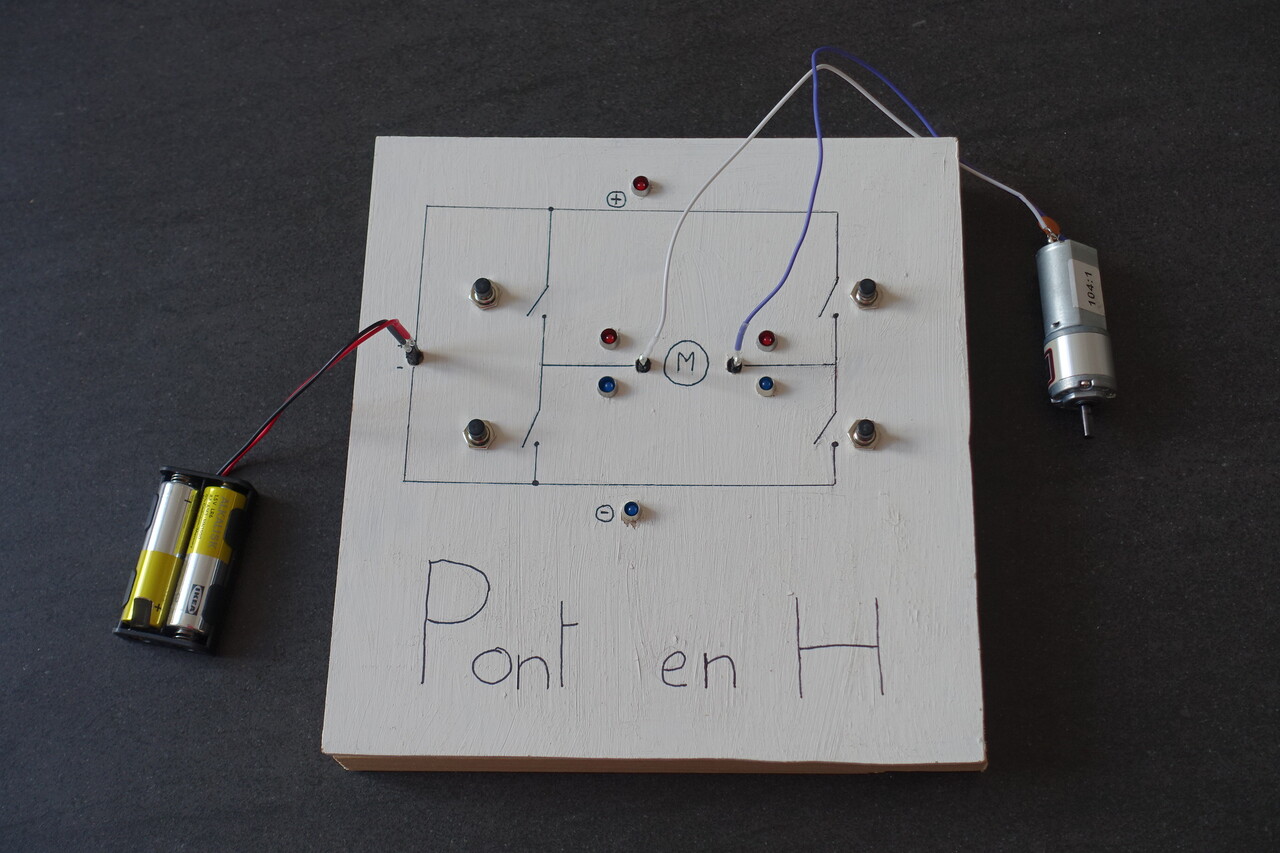
Démonstrateur "Pont en H" avec le moteur
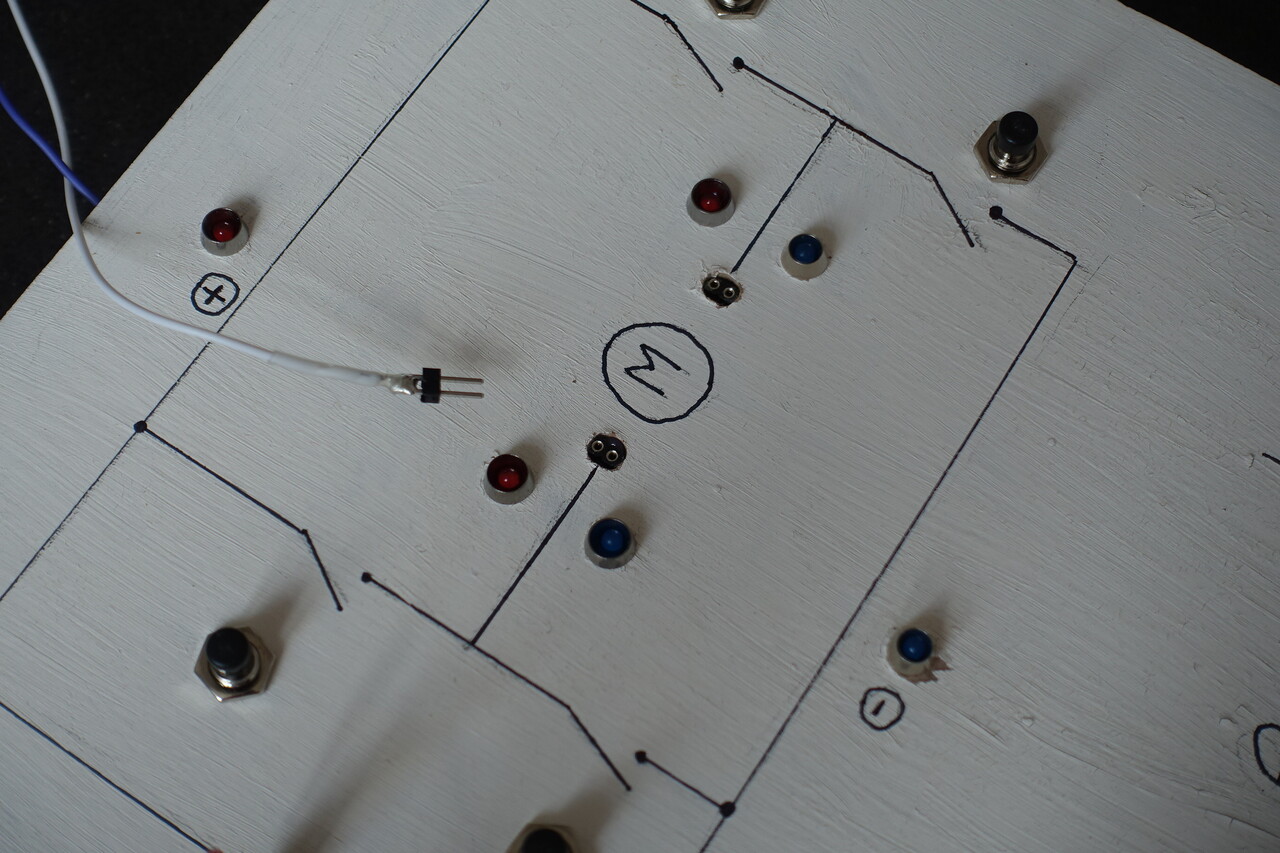
L’actuce pour éviter les court-circuit à vide.
Nous prévoyons également deux châssis avec des roues, pour présenter les problèmes de cinématique. Mais ce sera probablement l’objet d’un autre petit article.

C’est quoi ?
Mots clés : Électronique, Photo, Robot holonome, Pedagogique
Avancement début décembre 2021
6 décembre 2021
Quoi de neuf après ce week-end ?
Principalement les capteurs infrarouge. Comme capteurs de détection de l’opposant, nous utilisons des SFR04, un devant, un derrière, qui nous ont fidèlement servis durant des années.
Cette année, nous allons vouloir longer la bordure et nous savons que notre odométrie n’est pas précise au millimètre après plusieurs déplacements. Nous installons donc des capteurs Sharp de type GP2Y0A41Y2 sur les côtés de notre robot.
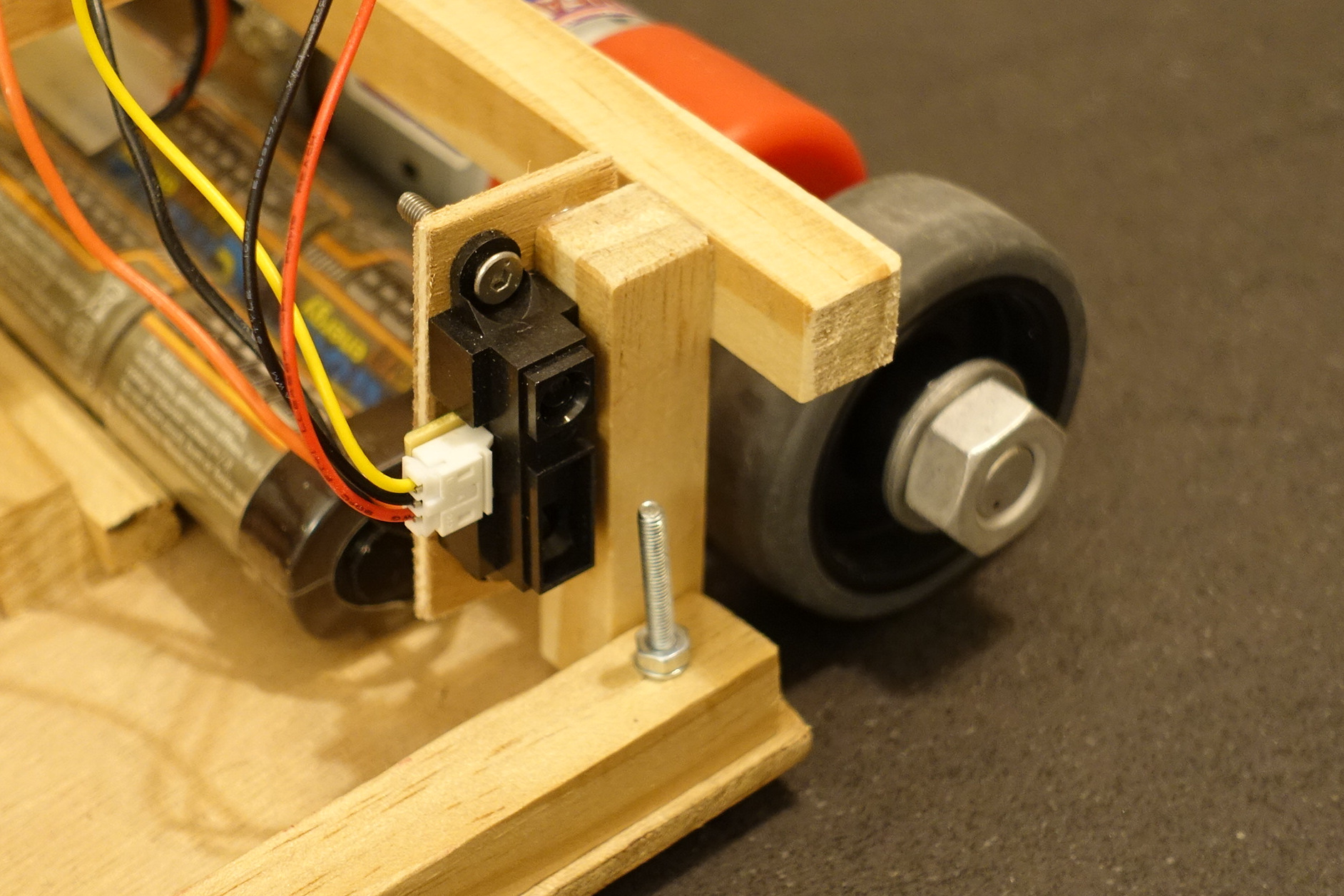
Capteur IR à côté de la roue
Après avoir testé les capteurs sur notre petite carte de développement, nous rallongeons les câbles et les raccordons sur la carte du robot.
Nous adaptons le code de la carte pour renvoyer les valeurs des capteurs infrarouge à l’interface de supervision puis adaptons le code de l’interface de supervision.
Ça marche bien... pour le capteur branché en IR_1. IR_2 refuse de donner des valeurs cohérentes. Les mesures de tension sont 10 fois plus faibles qu’attendues. Est-ce que la broche du PIC est grillée ?
Non ! Après une heure de recherche, il s’avère que le problème était logiciel. Le code des servomoteurs tentait de piloter un servomoteur branché sur IR_2. Ceci car nous avions eu un soucis avec U3, le régulateur de tension 7805 des servomoteurs 1, 2 et 3. Nous avions réaffecté IR_2 (dont nous ne nous servions pas) à Servo3. Le prix à payer pour réutiliser une carte et un code vieux de 5 ans...
(Pour visualiser ça, utilisez le plan interactif de notre carte.)
Après réaffectation des broches comme initialement prévu, les valeurs retournées sont parfaitement cohérentes.
Un dernier doute m’habite, ces capteurs ne riquent-ils pas d’être aveuglés par l’éclairage de la Coupe ?
Mots clés : Électronique, Programmation, Eurobot 2022, Photo
Documenter ses cartes électroniques
9 août 2021
J’ai eu l’occasion de réveiller un vieux projet et de me heurter à un certain nombre de problèmes liés à l’obsolescence. J’en détaillerai probablement une partie prochainement.
Quand on ressort une vieille carte électronique, arrive rapidement la question du brochage des différents connecteurs. Je viens justement de trouver Pinion. C’est un outil qui permet de documenter les carte électroniques avec un rendu web impressionnant.
Je détaille l’utilisation de Pinion dans un article dédié que vous trouverez ici.
En attendant, voici le résultat obtenu après une petite journée de prise en main.
Mots clés : Électronique, Site, Eurobot 2022
Gyroscope opérationnel !
27 janvier 2014
Nous avons eu un peu de mal, mais nous avons enfin un gyroscope opérationnel !
Nous récupérons une valeur toutes les 50 µs, ce qui est énorme comparé à notre précédent gyroscope. Nous n’étions qu’à 4 ms. Ceci nous permettra de garder un angle précis même lors de petits chocs !
Concernant le reste de la carte électronique, il reste encore un peu de travail. Nous avons passé beaucoup de temps sur les protocoles de communication. Ceci nous permet de déboguer plus facilement notre code. C’est ainsi que nous avons fini par comprendre que notre code était bon et que malgré la fiche technique de notre gyroscope (ADXRS453) il fallait le calibrer.
Un petit schéma de ce qui nous reste à faire :
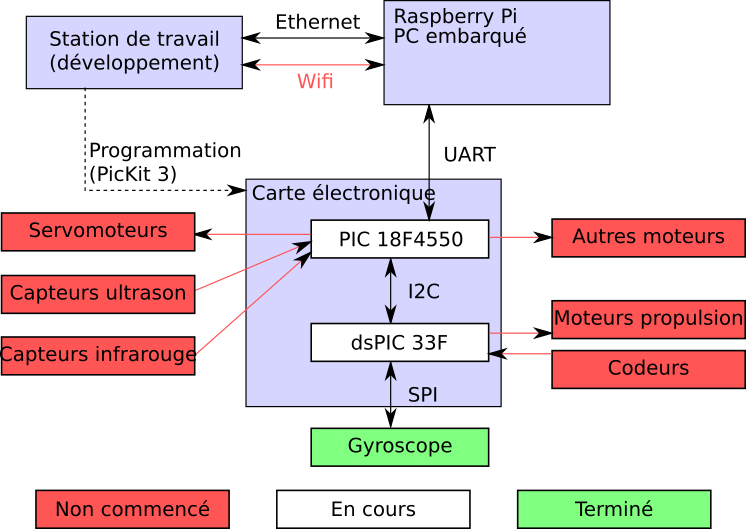
Architecture électronique
Ça a l’air énorme, mais le gros du travail se trouve autour des moteurs de propulsion et des codeurs. Nous avions déjà codés la gestion des servomoteurs et des capteurs ultrason sur un microcontrôleur quasi-identique les années précédentes. Si tout se passe comme pour l’I2C, ajouter la gestion des capteurs et des servomoteurs devrait nous prendre une petite semaine.
Enfin dernier point qui nous cause du soucis : nous n’avons pas encore alimenté la partie puissance de notre carte. C’est à ce moment là que nous risquons de causer de dégâts !
Mots clés : Électronique, Programmation
Carte électronique 2014
12 novembre 2013
Nous venons de recevoir notre carte électronique ! Nous attendons encore nos composants, mais ceux-ci ne devraient pas tarder à arriver.
Pour nous, c’est le grand luxe, 4 couches, vernis épargne et sérigraphie sur le dessus !
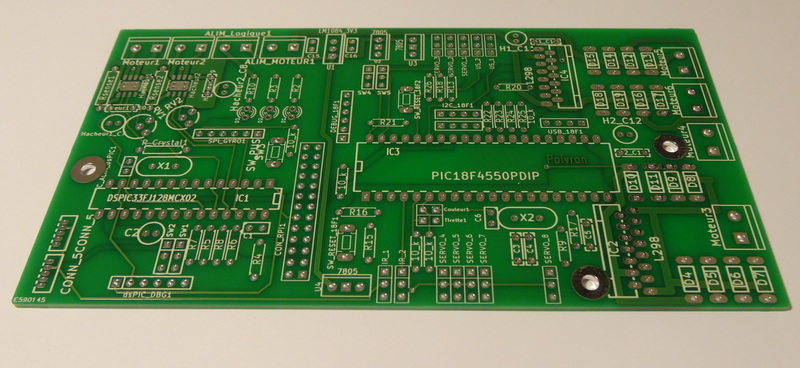
Carte électronique 2014 nue
La carte est composée de deux microcontrôleurs PIC, l’un s’occupe des moteurs et des codeurs, l’autre du Reste. La carte est censé gérer :
- 2 moteurs avec codeurs
- 2 moteurs en PWM
- 2 moteurs en tout ou rien
- 8 servomoteurs
- 2 capteurs IR
- 2 capteurs ultrason
- 1 connecteur I2C
- 1 connecteur SPI
- 1 connexion avec un Raspberry Pi
- 1 tirette
- 1 interrupteur "couleur"
Mots clés : Électronique
Administration du site