Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Fixation des cartes électroniques
4 mars 2012
Nous avons fini de tester les cartes électroniques, il s’agit maintenant de tout mettre sur le robot - bref, passer à l’intégration.
Nous récupérons trois cartes électronique de l’an dernier, dont une (la carte moteur) qui a besoin d’être refroidie par un ventilateur.
Il n’y a pas vraiment eut d’étape de conception pour la fixation des cartes, ce qui peut expliquer une mécanique "originale".
Quelques photos :
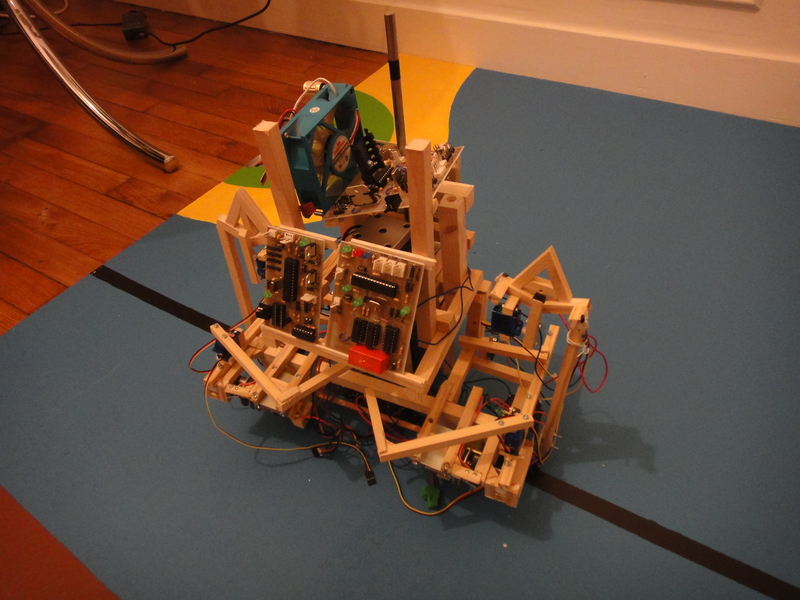
Robot avec ses cartes (1)
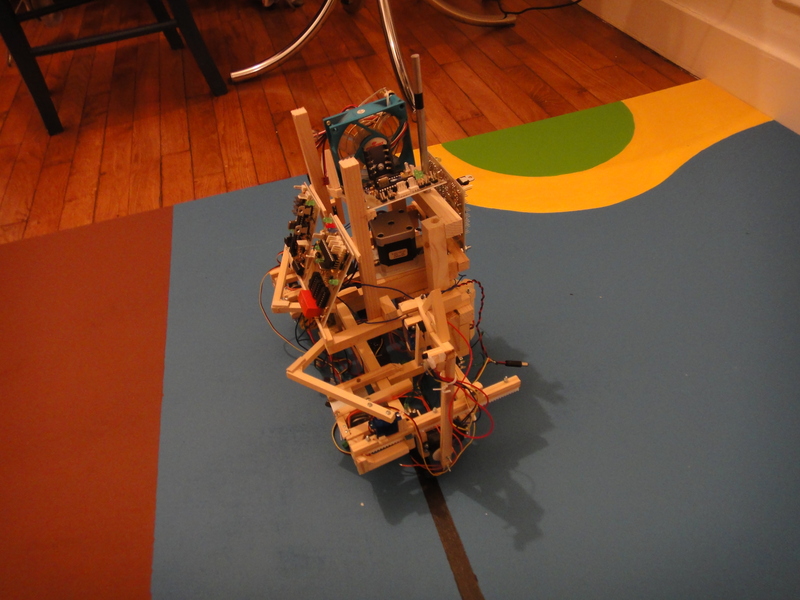
Robot avec ses cartes (2)
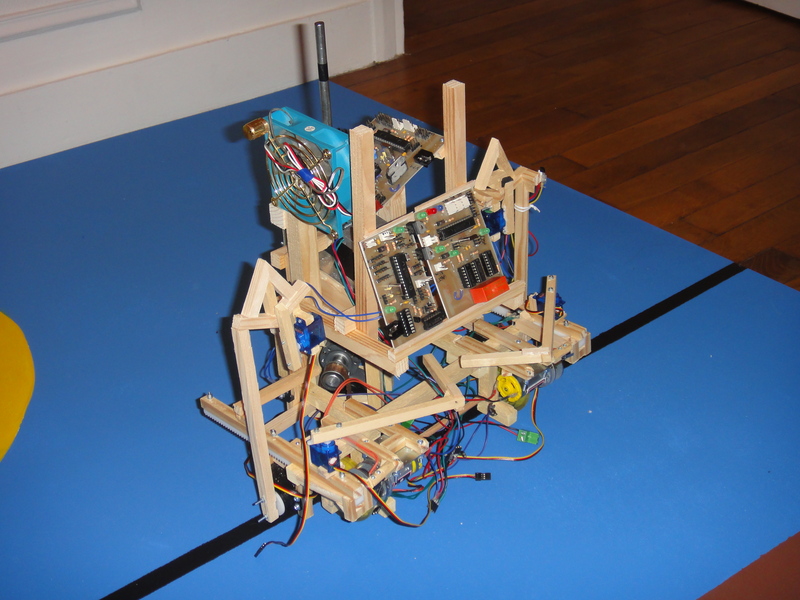
Robot avec ses cartes (3)
Un long travail nous attend maintenant pour éviter que le robot ne ressemble à un sac de nœuds.
Mots clés : Électronique, Mécanique
Attrape-lingots
3 mars 2012
Après avoir buté pendant une semaine à cause d’un petit soucis de programmation, voici notre premier attrape-lingot fonctionnel.
Une vidéo est disponible sur la page du robot 2012 tout en bas.
Pour la publication de la vidéo, nous nous initions à l’HTML5. Si vous rencontrez le moindre problème pour voir la vidéo, faites-nous signe !
Bataille avec un HS-55
24 février 2012
Pour tester le code de calibration des servomoteurs (ainsi que la carte électronique), nous avons mis un code qui permet de tester 5 à 6 positions de servomoteurs.
Le code envoie un signal de servomoteur avec un temps haut compris entre 0,7ms et 2,8ms, ceci nous permettait d’avoir un peu plus de 180° sur un servomoteur classique (HS-322HD).
L’un de nos servomoteurs (un HS-55) servait pour le test, il a pris ses différentes positions successivement comme demandé, puis il s’est mis à tourner de manière continue lorsqu’on lui demandait d’atteindre une position extrême.
Le servomoteur a été démonté. L’axe du potentiomètre est bien équipé d’un méplat mais aucun des engrenages en nylon ne semble s’enclencher sur ce méplat. Est-ce que la pièce était montée en force ? A-t-elle cassé ?
Mais surtout, risque-t-on d’avoir le même problème avec les autres servomoteurs ? Devons-nous brider la commander pour ménager les servomoteurs ?
La mécanique avance
27 janvier 2012
Cette semaine, nous avons scié de petites baguettes, fait de petits trous et de petits collages. Le résultat est que nos principaux actionneurs sont maintenant fixés sur le robot.
Et voila le résultat :

Robot 2012 plié

Robot 2012 - Pièces

Robot 2012 - Lingots
Mots clés : Mécanique
Les vis à bois, c’est mal !
22 janvier 2012
Les vis à bois présentent de nombreux inconvénients. Principalement, elle ne proposent pas une vraie solution démontable. Pour peu que le bois soit un peu mou, les vis ne tiennent plus après trois ou quatre vissage/dévissages.
Ensuite, il arrive que la vis fasse éclater le bois lors du premier vissage. C’est ce problème que nous avons rencontré lors de notre bref passage du coté obscure.
La solution mise en place, inspirée par certains vendeurs de meubles en kit, consiste à percer 2 trous perpendiculaires, l’un pour insérer la vis, l’autre pour insérer l’écrou. On revient à un simple boulon (vis + écrou). Simple, efficace et démontable.

Perçage de 3mm pour la vis, 8mm pour l’écrou |

Perçage de 2mm pour la vis, 5mm pour l’écrou |
Mots clés : Conception, Mécanique
Administration du site