Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Notre projet, un ascenseur et de la mécanique
10 décembre 2023
Du robot 2024 en général
Planète Sciences nous demande, pour participer à la coupe de France de Robotique, de produire une présentation de notre projet scientifique et technique. L’an dernier, nos axes principaux étaient :
- La maîtrise d’un robot holonome,
- L’utilisation du Raspberry Pi Pico
- L’utilisation de courbe d’accélérations et de décélération
Globalement, nous avions tenu nos objectifs.
Cette année, notre projet, c’est d’avoir un robot qui impressionne, qui crée un effet "Wahou !". Pour cela, nous voulons :
- une mécanique qui tire avantage d’un robot holonome
- une réalisation en bois, à la scie à chantourner
- un robot joli avec du bois teinté
Évidemment, une fois que nous avons annoncé cela, le risque de vous décevoir est grand. Mais tant pis, on y va !
Donc le but est de saisir les plantes avec une pince "3 doigts", celle présentée sur la brève précédent. Cette pince est montée sur un ascenseur (voir plus bas) et l’ensemble sur un translateur. Cette mécanique permet de prendre la plante et de la poser dans un pot, situé à gauche ou à droite de la pince.
Mais 2 pots ne nous suffisent pas ! Nous voulons en transporter 6. L’idée vient donc de les porter autour du robot, formant un hexagone. Une fois que les pots adjacents à la pince ont reçu leur plante, le robot lâche ses pots, tourne sur lui-même de 120° et rattrape ses pots. Ainsi les pots adjacents à la pince sont de-nouveau vide.
Voici deux vues issues de la modélisation.
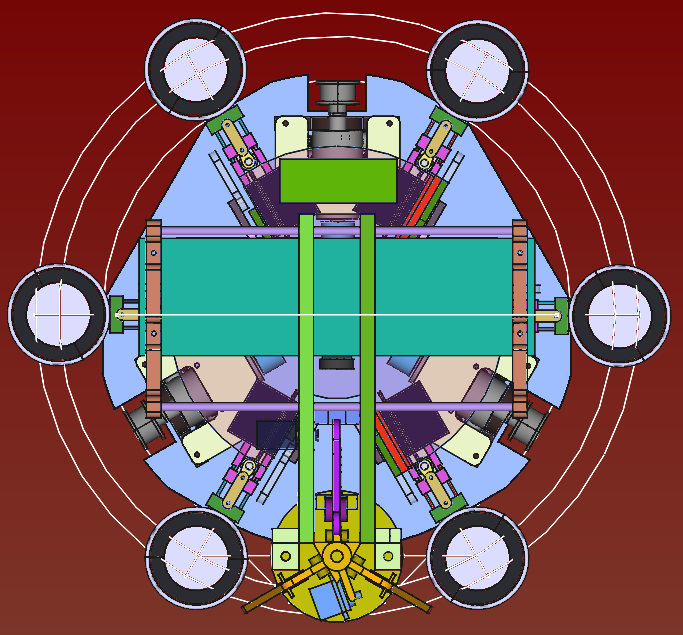
Vue de dessus du robot 2024

Vue 3/4 du robot 2024
Ce qui implique d’avoir 6 bras pour les pots.
Donc pour résumer, il nous faut :
- Une pince 3 doigts : OK
- Un ascenseur : OK (si, si, regardez plus bas)
- Un translateur : c’est en cours
- 6 bras pour les pots : prototype : ok, pré-série : ok.
Nous venons de finir le modèle "pré-série" pour les bras pour les pots. Ceci nous va nous permettre de continuer la modélisation 3D du robot et de réaliser les 6 bras prochainement (mais pas demain, hein !).
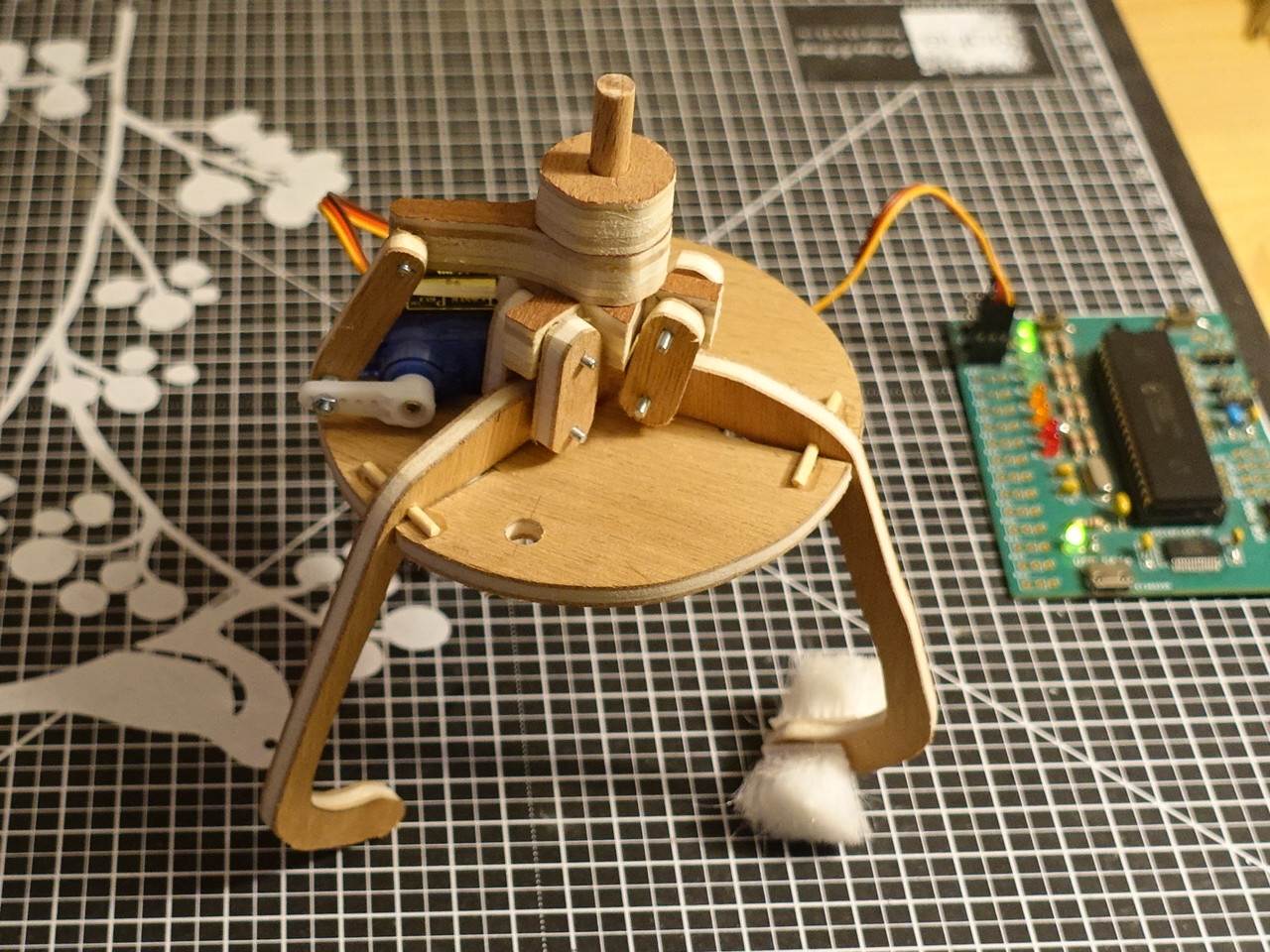
L’ascenseur
L’ascenseur, se base sur un principe (aimablement) piqué à l’équipe Les Karibous : un servomoteur, une bielle, une manivelle et un guidage. Avec ça, le tour est joué.
La mécanique
Nous vous avons beaucoup parlé de la mécanique. Nous mettons nos fichiers à disposition !
Mots clés : 2024, Mécanique, Vidéo, Photo, Conception
Une pince pour les plantes : le grappin !
12 novembre 2023
Pour attraper les plantes, il faut une pince, ou un dispositif similaire. Nous choisissons d’utiliser une pince à 3 doigts, parce que cela semble à la fois joli et efficace.
La voici en images :

Les doigts découpés à la scie
Et une fois montés :

Doigts assemblés
Ensuite, nous ajoutons le mécanisme pour piloter les doigts et le servomoteur pour actionner le mécanisme.
Le grappin !
L’ensemble en action à vide :
L’ensemble avec une plante :
Y’a plus qu’à :
- réaliser l’ascenseur pour monter la plante
- réaliser l’axe latéral pour mettre la plante dans un pot.
Bref, il reste du travail.
Mots clés : Conception, Mécanique, Photo, Vidéo
Un capteur, le VL53L8CX et un actionneur, le bras pour les pots
26 octobre 2023
Le règlement définitif de la Coupe de France de robotique est enfin publié et nous avons donc avancé dans la conception générale de notre robot.
Tout d’abord, nous avons abandonné complètement l’idée de notre premier actionneur, cette espèce de doigt. En effet, la présence des feuilles faisait qu’il repoussait les plantes au lieu de les saisir et pour les pots, la force nécessaire pour les tenir lorsqu’ils contiennent une plante nous paraissait trop grande.
Puis nous avons décidé que nous nous focaliserons sur la partie principale du règlement, attraper les plantes pour les mettre en pot et les stocker dans la jardinière. Pour cela, nous identifions trois parties principales du robot :
- une pince pour attraper les plantes ;
- un bras pour manipuler les pots ;
- une zone de stockage des pots.
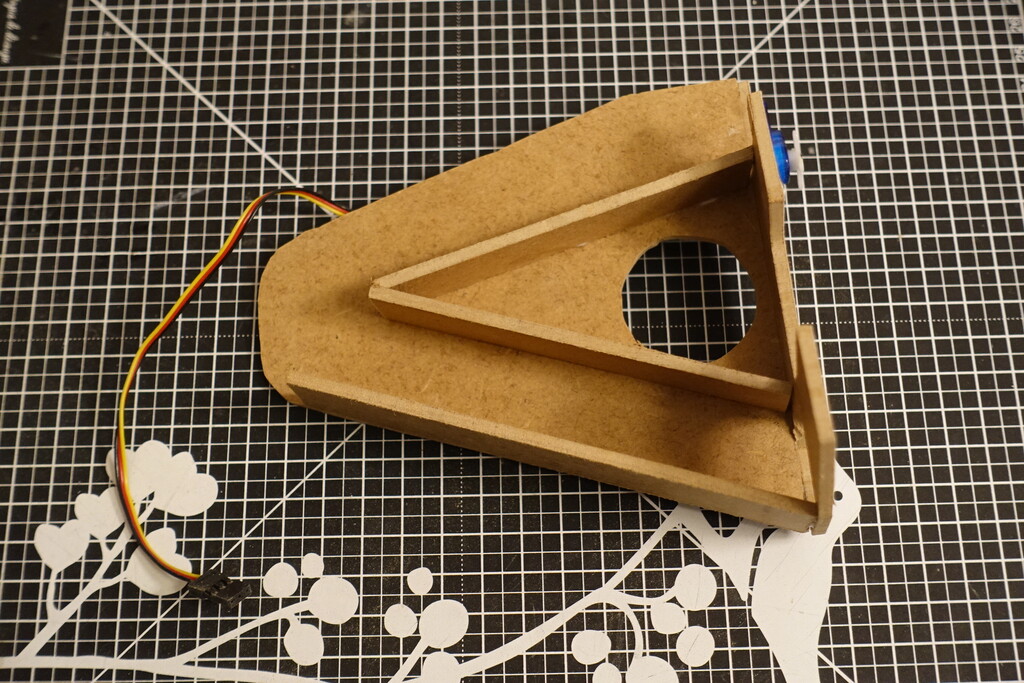
Le bras des pots
Le bras pour manipuler les pots va avoir un gros impact sur la conception du robot. Nous avons rapidement réalisé un prototype en faisant un pari risqué : nous parions que les pots seront ceux d’Ikea lors des compétitions et nous les ersatz en impression 3D.
La détection des plantes
Cette année, l’élément de jeu principal - les plantes - ne se trouve pas à une position fixe sur la table de jeu. Nous décidons d’utiliser un système de détection pour les trouver.
Notre choix se porte sur le VL53L8CX après des essais plus ou moins concluants avec le VL53L1X. Le VL53L1X semblait prometteur dans le sens où nous étions en bonne voie d’arriver à détecter un pot. Mais le VL53L8CX présente de nombreux avantages, notamment une utilisation plus simple pour ce genre de cas et une bien meilleure précision.
Nous fournissons un code "rustique", basé sur l’API de STMicroelectronics (STM), pour le Raspberry Pi Pico avec un bout de code pour visualiser les données sur le PC avec Processing. L’ensemble est sur notre Gitea.
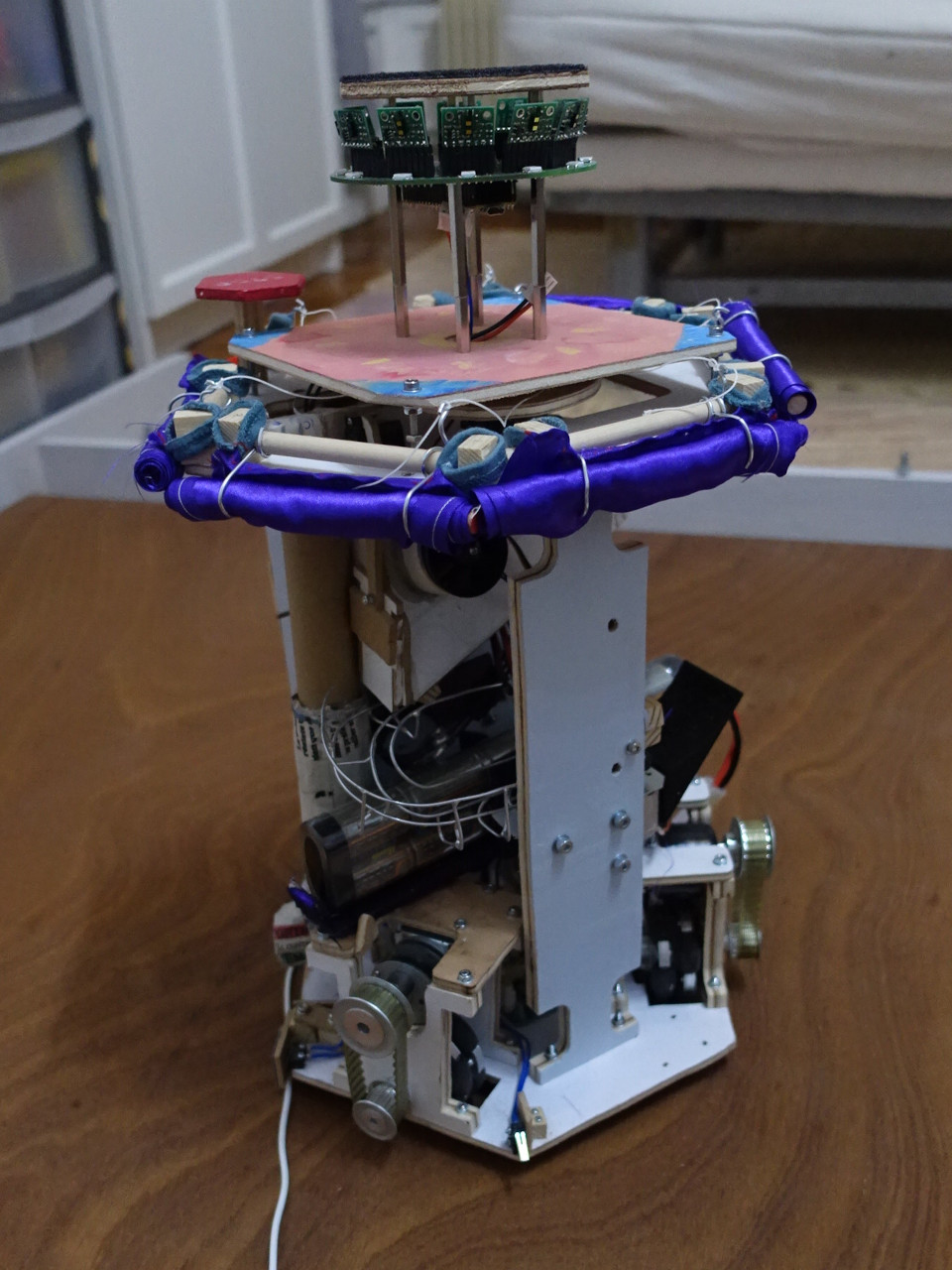
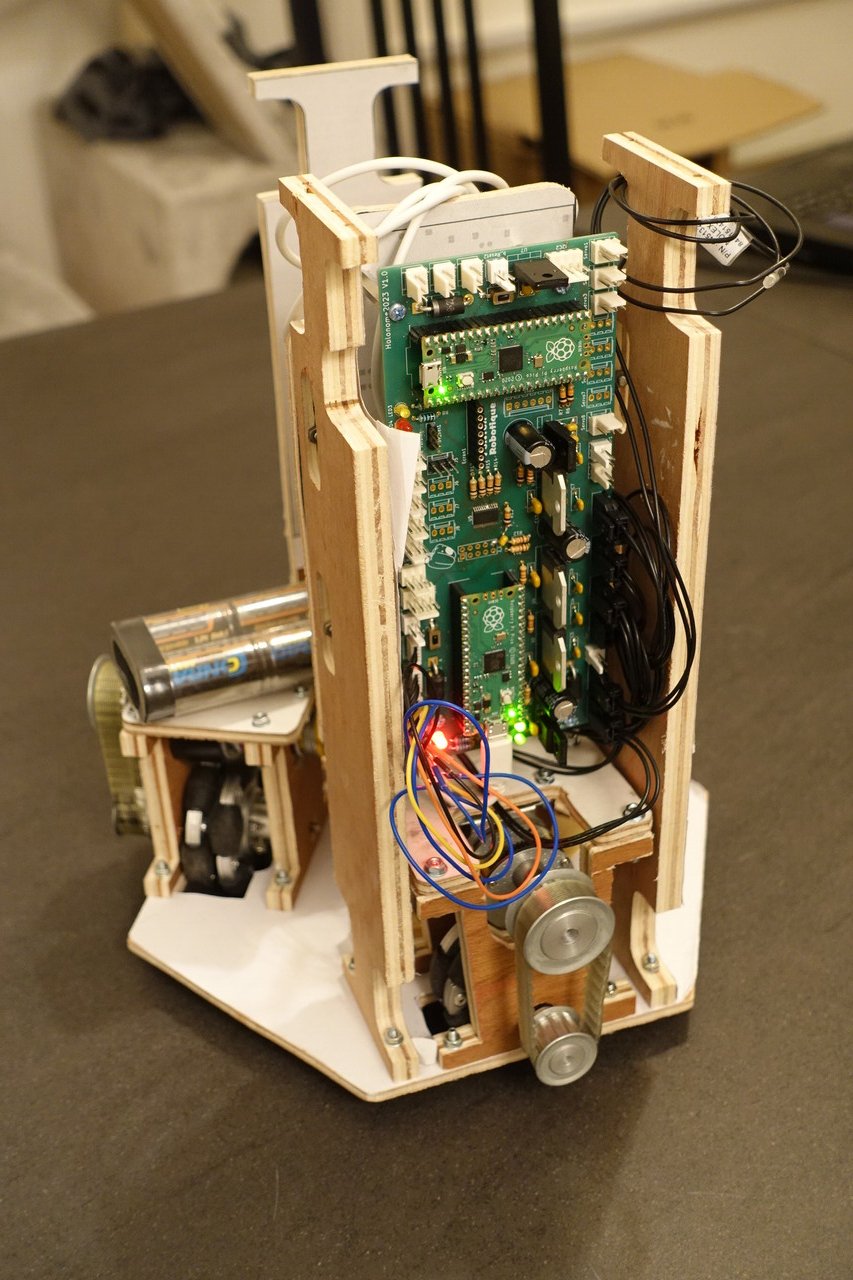
Le montage se base sur les cartes SATEL de STM.

Montage avec le Raspberry Pi Pico et la carte SATEL-VL53L8CX
Voici une vidéo des données visualisées lorsque le capteur voit une plante passer devant puis s’en rapproche. Chaque pixel contient une information de distance, de 2 cm à 4 m, avec une précision de l’ordre du millimètre. Bleu signifie que l’objet est loin (65 cm dans la vidéo), rouge que l’objet est très proche.
Bref, nous sommes très contents de ce capteur !
Mots clés : 2024, Vidéo, Programmation, Capteur, Mécanique
Contacteurs et détection de l’adversaire
23 février 2023
Inscription à la Coupe de France
Cette année, nous participons à la coupe de France de Robotique dans la catégorie "Legends" nouvellement créée. Une des conditions est de fournir un projet scientifique et un plan de communication. Voici le nôtre.
{kind=link}
Aspiration des balles
Le dernier prototype nous avait donné satisfaction, voici la vidéo.
Aspiration des balles avec le prototype (1 Mo).
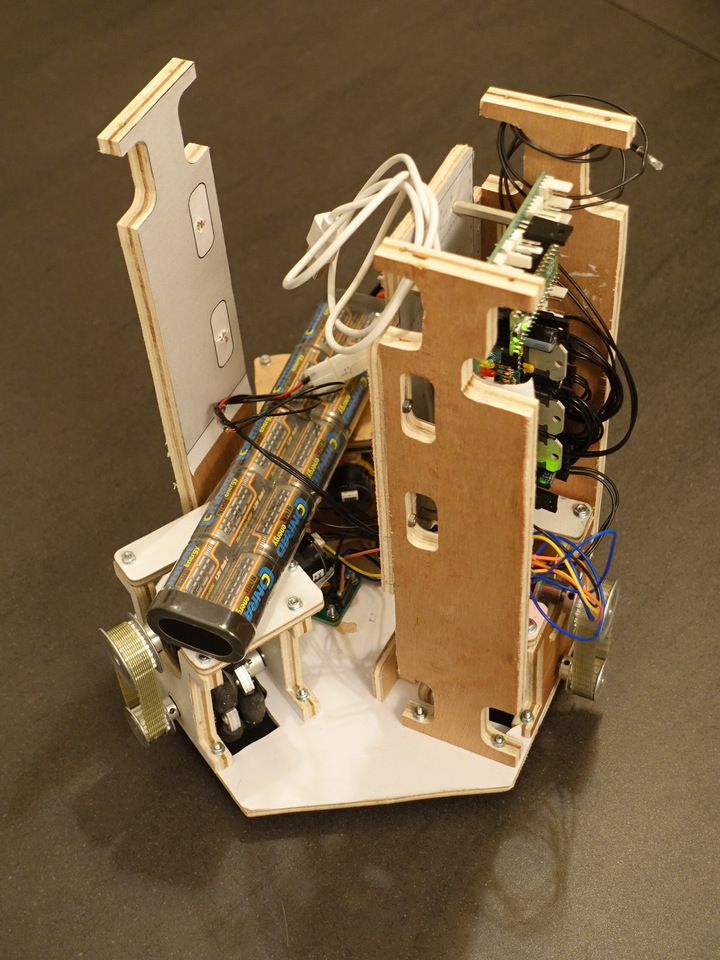
Voici quelques photos de la construction de la version finale. Nous l’avons bien montée une fois sur le robot mais démontée presque aussi tôt pour s’occuper des contacteurs.
Aspiration cerises : démontée

Aspiration cerises : vue de face
Une autre raison pour laquelle nous avons démonté le système, c’est que lors de nos essais la turbine était maintenue à la main et que nous l’avons bousillée. Attention, les pâles de turbines sont vraiment dangereuses pour les yeux !

Turbine HS
Nous avons reçu les nouvelles turbines, mais nous ne les avons pas encore installées.
Installation des contacteurs
Les contraintes de place sont assez fortes au niveau des contacteurs. Surtout que ceux-ci doivent être protégés car nous comptons sur eux pour longer des murs. Nous avons finalement un modèle qui nous satisfait. Voici le prototype :
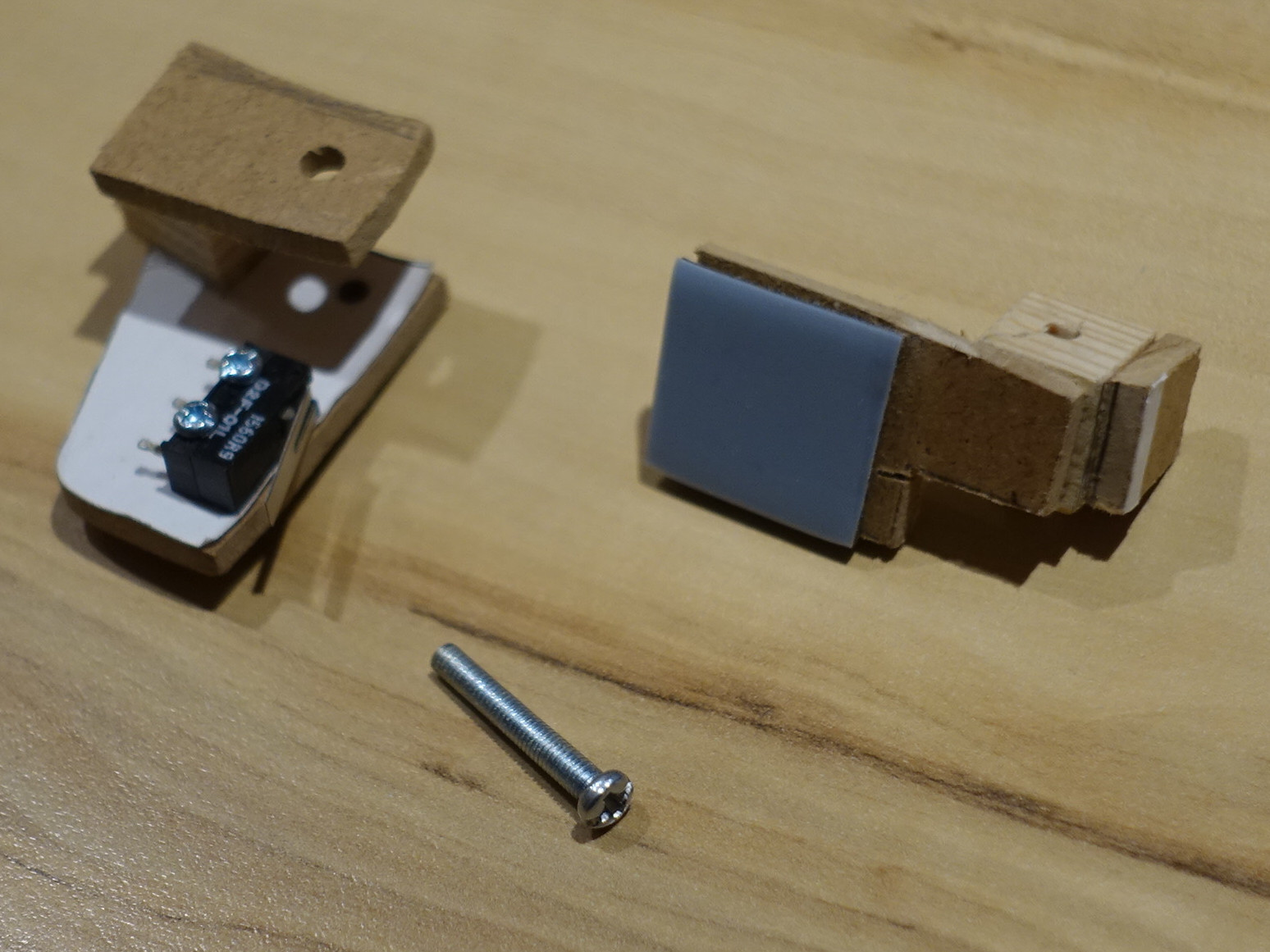
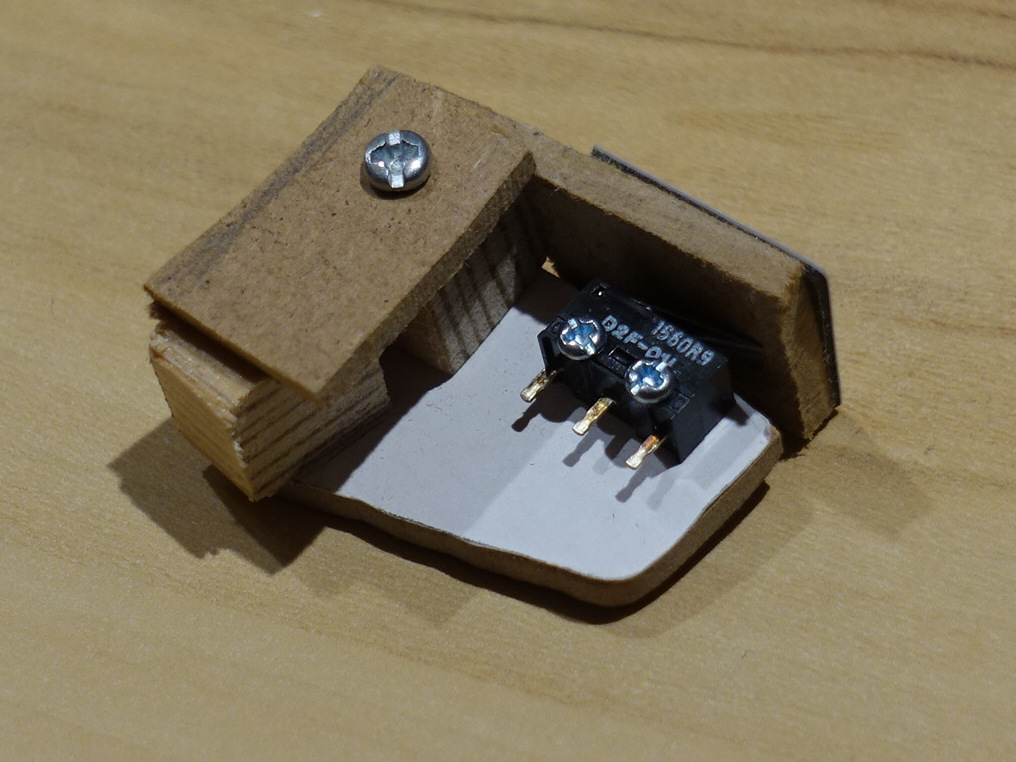
Contacteur désassemblé
Contacteur assemblé
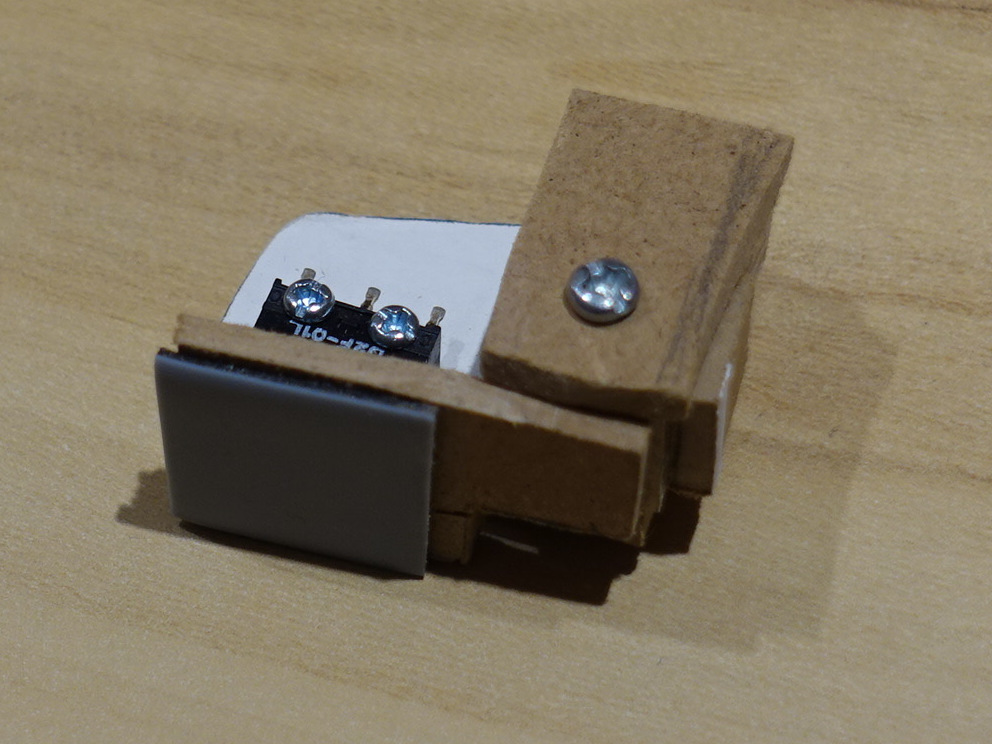
Surface en PTFE pour les frottements
L’intégration nous a quand même demandé un peu de temps. Mais les contacteurs sont maintenant câblés et raccordés à la carte électronique.

Contacteur "fin de course"

Contacteurs pour longer les murs
Détection de l’adversaire
Nous avons fini la conception de nos cartes, commandé et reçu nos cartes de détection de l’adversaire.

Nous les avons aussi partiellement soudées. Nous avons commandé les mauvaises référence de LED, nous attendons la nouvelle commande. Nous n’avons pas encore soudé tous les capteurs. Nous attendons de valider un minimum le code avant de tous les souder.
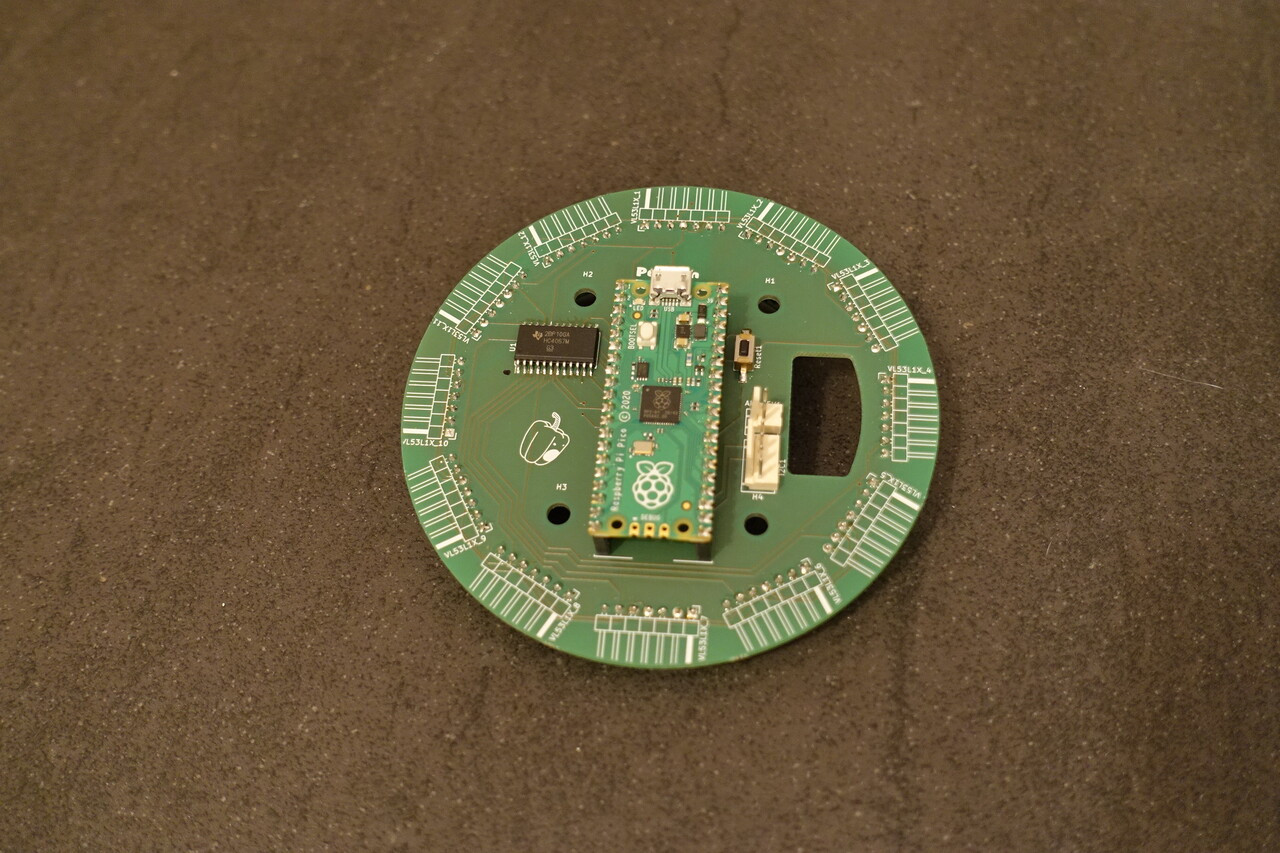
Détection - dessus

Détection - dessous
Les quelques lignes de code montrent que la carte se comporte comme prévu, avec la possibilité de désactiver les capteurs un par un.
Déplacement
Nous arrivons enfin à finaliser un mouvement qui nous tenait à cœur : avancer droit en faisant tourner le robot sur lui-même.
C’est probablement l’un des mouvements le plus complexe que le robot aura à faire et donc un bon moyen de valider notre architecture.
Bref, la joie du robot holonome !
Avancement
Du côté de nos tâches :
- Reprendre les tests avec la turbine
- Aspiration : nous avons enfin un prototype concluant
- Soufflage : abandon, nous allons tenter de propulser les cerises avec des roues.
-
Placer des contacteurs sur le robot pour détecter les bordures: Fait ! - Longer les bordures
- Transformer la base roulante en robot :
- Installer le mat balise
- Intégrer la turbine : réalisation à 90%
- Améliorer la détection de l’adversaire
- Électronique : carte reçue et partiellement soudée et testée
- Programmation : sélection des capteurs opérationnelle
Mots clés : Conception, Coupe, Électronique, Mécanique, Vidéo, Photo, Robot holonome, 2023
Le robot se structure + détection de l’adversaire
15 janvier 2023
À force de faire des essais et de laisser traîner la carte sur le bureau, une patte de résistance qui traînait a arqué et ça nous a motivé à faire un support propre pour la carte électronique.
Support carte électronique
Support carte électronique
Nous avons profité de l’arrivée d’un jeune nouveau membre pour commencer la carte de détection de l’adversaire. Si tout se passe comme prévu, nous utiliserons des capteurs VL53L1X :
- Côté électronique, nous sommes proches d’avoir fini le schéma
- Côté programmation, nous arrivons à lire un capteur, notre code est sur github.
Enfin, nous avons fini notre article sur les astuces pour utiliser VS Code pour le Raspberry Pi Pico.
Du côté de nos tâches :
-
Écrire notre mémo sur l’utilisation de VSCode avec le Raspberry Pi Pico: Fini à l’instant. -
Finaliser le code i2c non bloquant: Fait ! - Reprendre les tests avec la turbine
- Aspiration : nous avons enfin un prototype concluant
- Soufflage : les premiers essais donnent une bonne piste pour le prototype
- Placer des contacteurs sur le robot pour détecter les bordures
- Longer les bordures
- Transformer la base roulante en robot :
-
Fixer la carte électronique: Fait ! - Installer le mat balise
- Intégrer la turbine : conception ok
-
- Améliorer la détection de l’adversaire
- Électronique : schéma à 90%
- Programmation : lecture du capteur ok
Mots clés : Mécanique, Programmation, Photo, Robot holonome, 2023
Administration du site