Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
Pour la rentrée 2022...
31 août 2022
Bon ici, petit coup de mou. Le forum des associations de notre ville est prévu pour ce week-end... Nous espérions tenir un stand afin de recruter quelques membres et monter un club de robotique...
Nous avons appris vendredi dernier qu’il fallait être une association pleinement constituée pour pouvoir participer au forum 🙁 ...
Nous avons bien déposé tous les documents pour constituer une association vendredi dernier, à la Rache, mais nous ne croyons pas trop obtenir tous les documents ET convaincre la mairie de nous trouver un stand avant samedi prochain…
Bref, si vous êtes près de Riom (63200) et que la robotique vous intéresse, contactez-nous !
Pour l’occasion nous essayons d’avoir deux démonstrateurs pour montrer la différence de cinématique entre un robot différentiel et un robot holonome.
Pour l’instant, seul le démonstrateur différentiel est prêt...
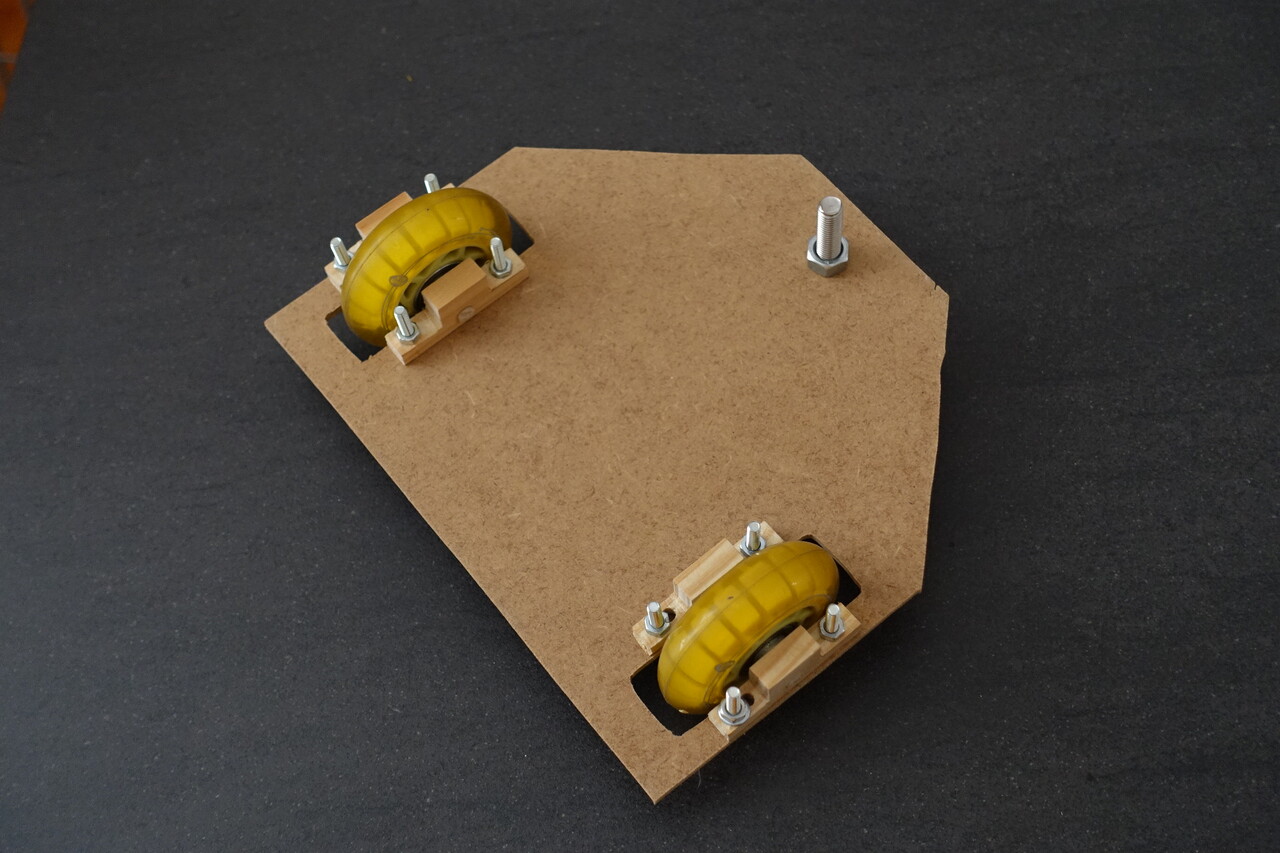
Demonstrateur différentiel - dessus
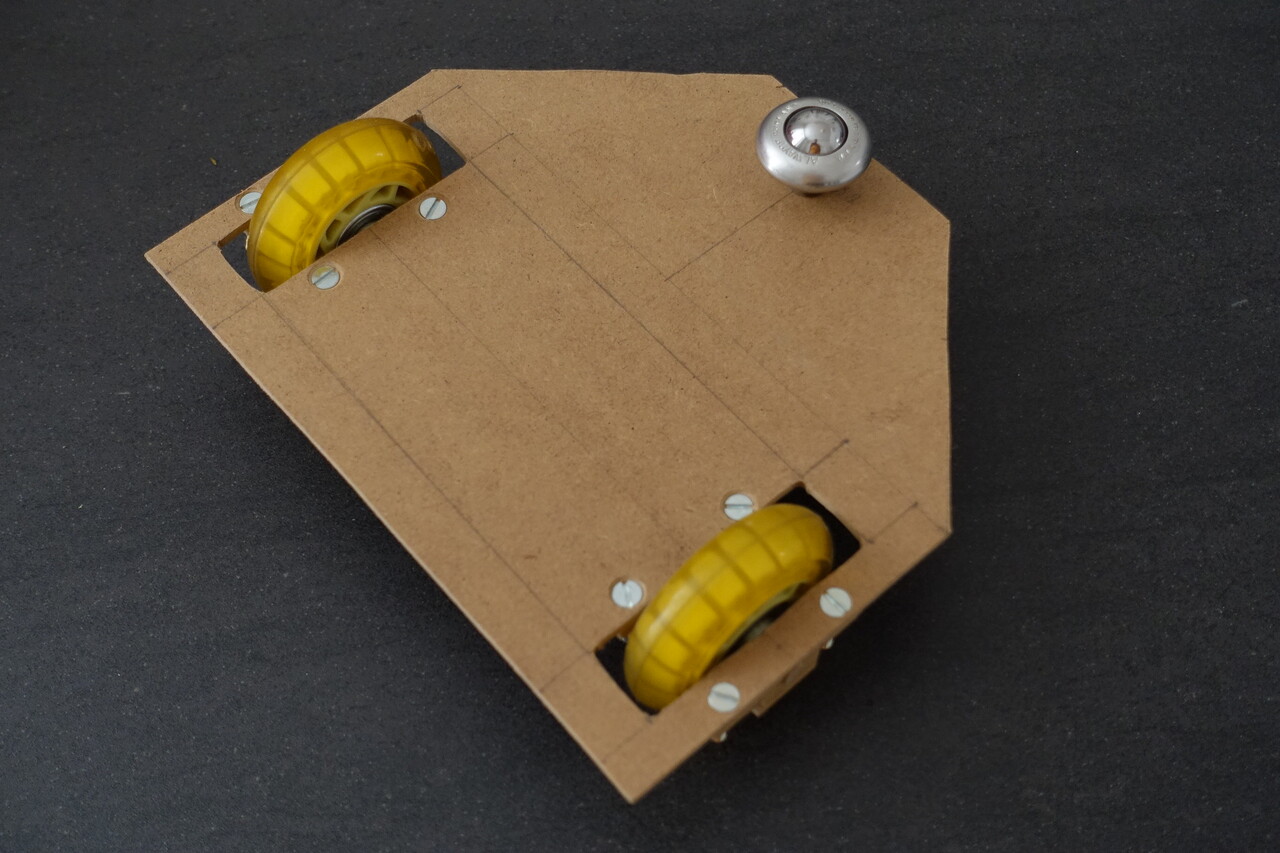
Demonstrateur différentiel - dessous
Le démonstrateur holonome a pris du retard, car nous avons égaré des pièces chez nous, les accouplements des roues...
Du coup, en attendant de retrouver les pièces 😕 , nous travaillons sur la théorie de la localisation d’un robot holonome à partir des codeurs des moteurs. Article en cours avec (attention, teaser) de la trigo, des tenseurs cinématiques et des matrices - pour public averti !
Mots clés : Photo, Pedagogique
Les activités de l’été 2022
21 août 2022
Après la coupe, c’est souvent calme. Il a fallu rentrer, ranger, ranger et ranger. Nous avons passé un peu de temps à préparer les articles et les vidéos de nos matchs et toute la vie quotidienne qui nous avions laissée en suspend revient... Bref, il a bien fallu deux mois avant de pouvoir recommencer un peu de robotique.
Dans les dates importantes à venir, il y a la présentation du règlement Eurobot 2023, le 10 septembre 2022. Vous avez quelques informations sur le site CoupeDeRobotique.fr et le lien de la diffusion sur Youtube, ici.
D’un point de vue plus local, nous espérons avoir un stand au forum des associations de la ville de Riom, qui aura lieu le 4 septembre. En prévision de cet évènement, nous préparons quelques démonstrateurs.
Le plus abouti est celui pour le pont en H. L’idée c’est d’avoir d’un côté un moteur avec une pile, où les gens peuvent constater que la moteur change de sens de rotation en fonction de la polarité. De l’autre, d’avoir ce démonstrateur qui a deux modes de fonctionnement :
- Sans moteur branché, il est possible d’appuyer sur tous les boutons sans créer de court-circuit et de voir la propagation de la tension.
- Avec le moteur, (malheureusement sans protection), où en appuyant sur les bons boutons, il est possible de piloter le moteur dans les deux sens.
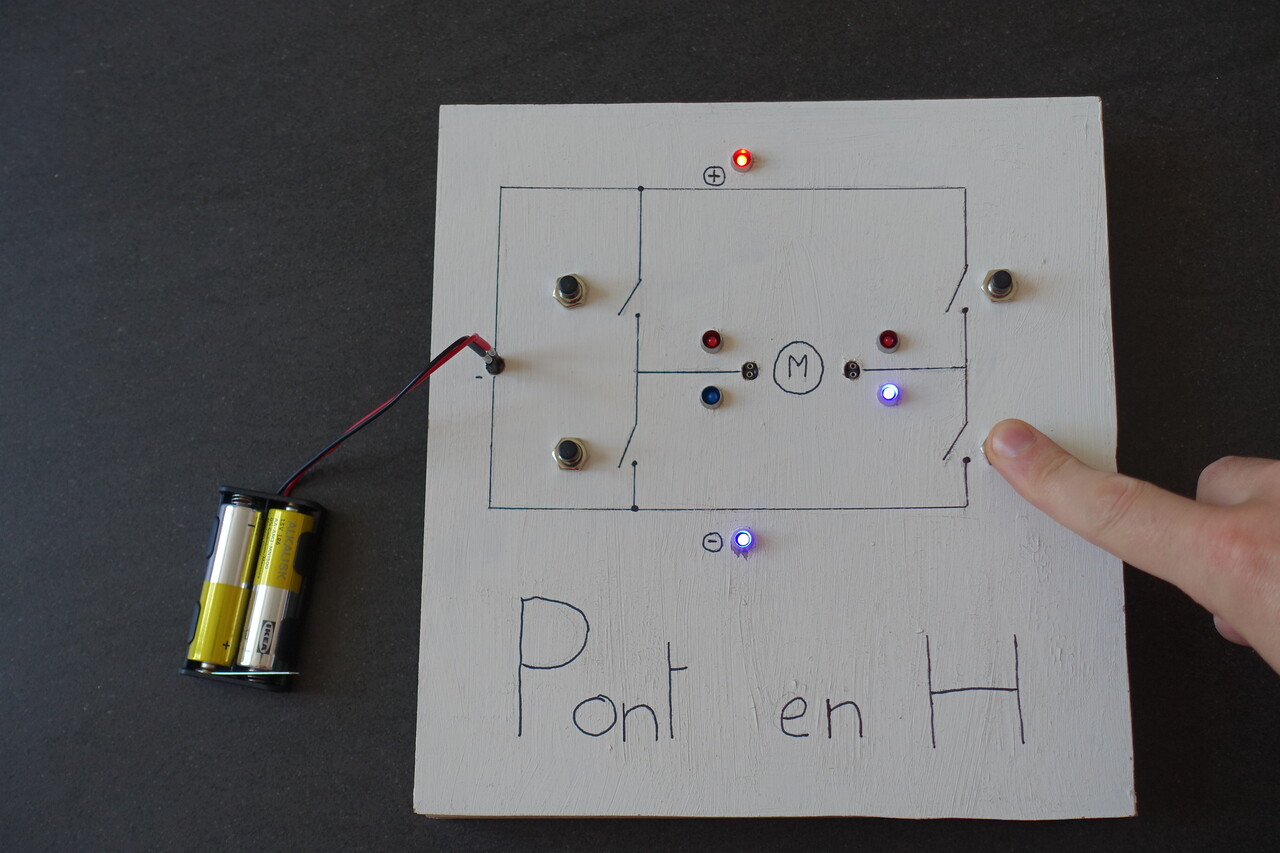
Demonstrateur "Pont en H"
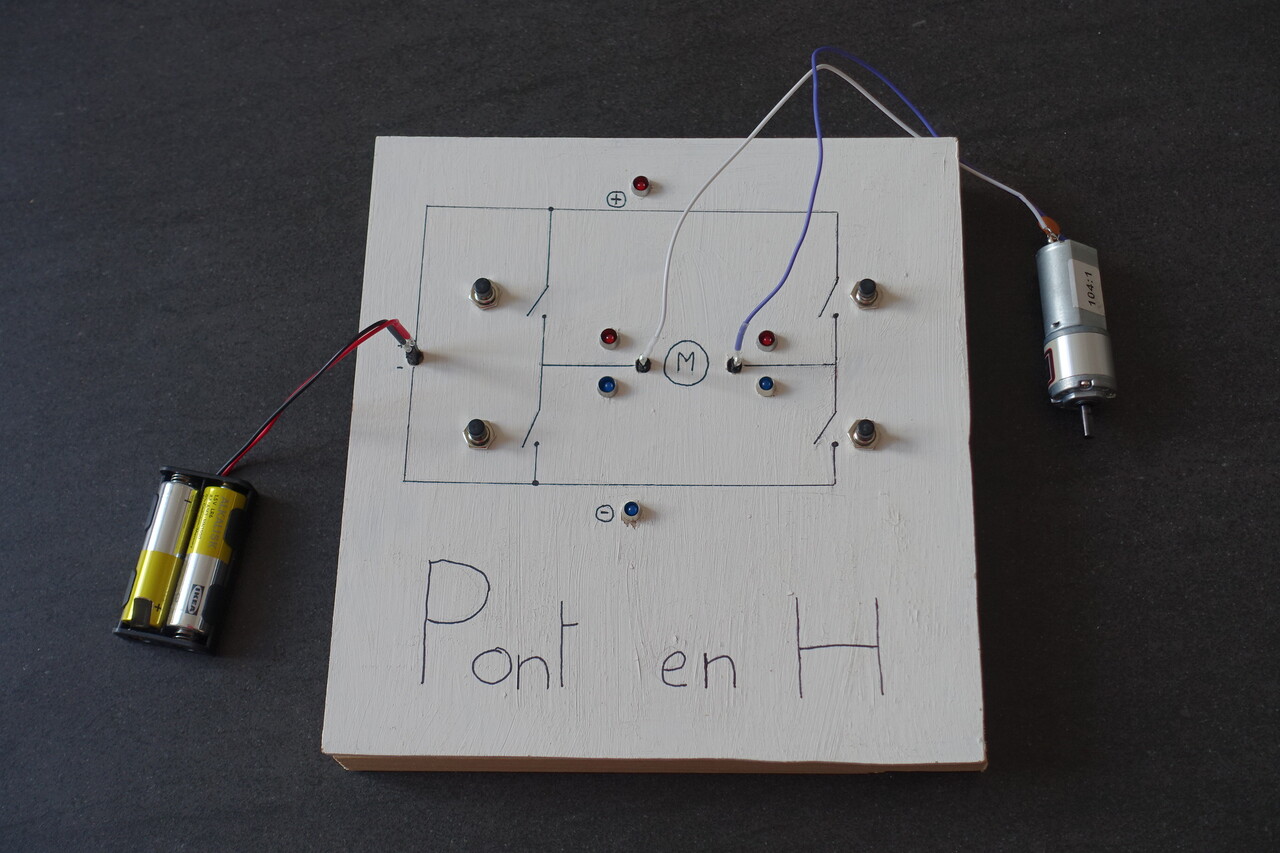
Démonstrateur "Pont en H" avec le moteur
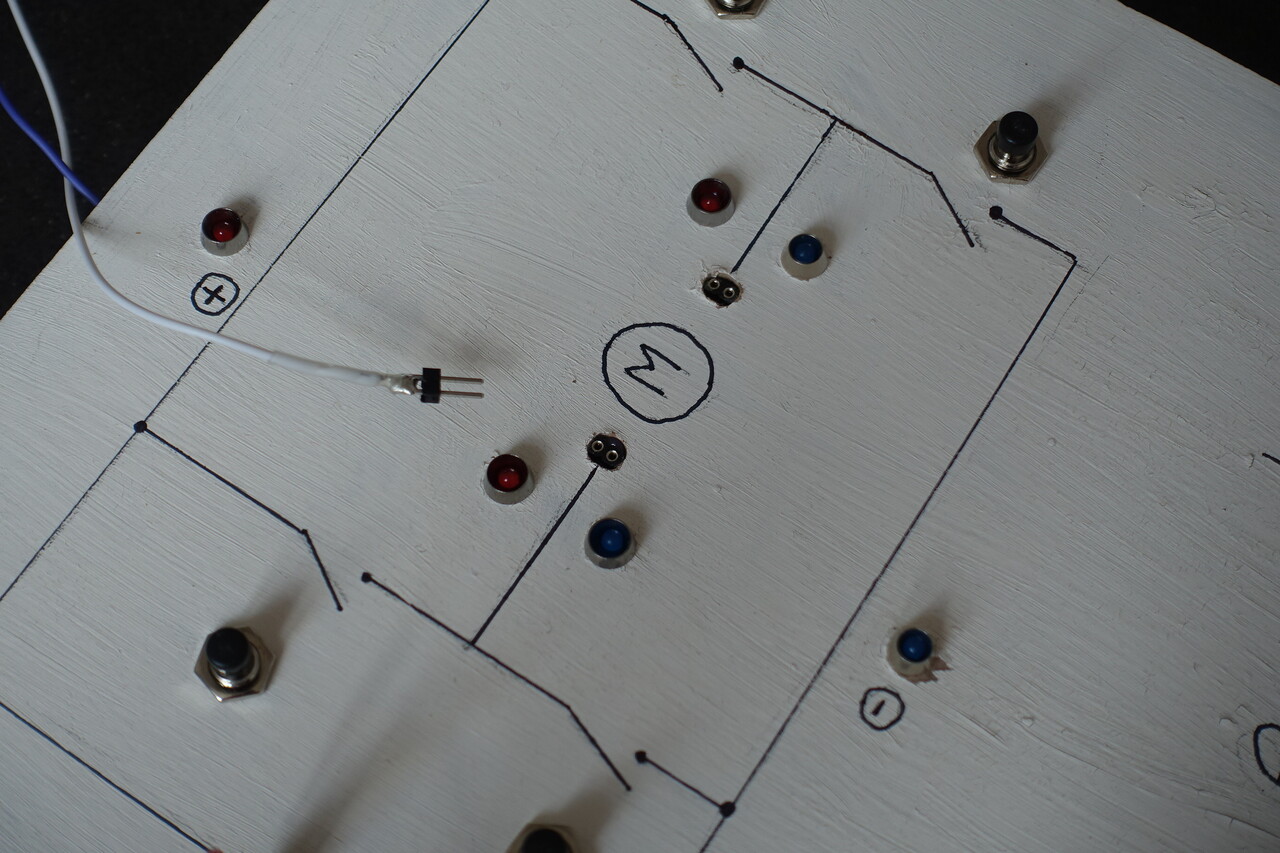
L’actuce pour éviter les court-circuit à vide.
Nous prévoyons également deux châssis avec des roues, pour présenter les problèmes de cinématique. Mais ce sera probablement l’objet d’un autre petit article.

C’est quoi ?
Mots clés : Électronique, Photo, Robot holonome, Pedagogique
Prix de l’éco-conception
17 juin 2022
Nous terminons 10e au classement général, bien au-delà de nos espérances. Nous nous mettons à rêver de phases finales, mais sans nous faire trop d’espoir. Même avec un match optimal, notre robot aurait du mal à rivaliser avec les équipes mieux classées que nous.
Puis la réalité nous rattrape, nous sommes vieux ! Trop vieux pour participer aux phases finales.
Finalement nous apprenons que nous allons recevoir un prix. Ce n’est qu’en arrière scène que nous apprendrons que CapGemini nous remet le prix de l’éco-conception. Nous avons alors l’occasion de discuter avec eux et de comprendre pourquoi ils nous remettent ce prix. Car ce n’est pas simplement par que le robot est en bois que nous recevons ce prix.

L’équipe avec CapGemini !
Voici les différentes raisons :
Parce que le robot est en bois
Ben oui, quand même, ça aide... Le choix des matériaux peut avoir de gros impacts sur l’environnement...
Pour l’architecture électronique
La quasi-totalité de notre code fonctionne sur deux microcontrôleurs. L’un est un PIC 8bits à 48 MHz, le second un PIC 16bits à 48 MHz. Ce qui est relativement modeste comparé aux ressources déployées par d’autres équipes.
Soyons honnêtes, nous avions quand même un Raspberry Pi sur notre robot... Un ajout de dernière minute...
Pour nos actionneurs
Chaque actionneur, chaque action a été pensée pour être la plus simple possible. Que ce soit le "crochet" pour attraper la statuette, le mécanisme pour attraper les échantillons de l’abri de chantier ou même le système pour les carrés de fouilles,
Si nous devions définir l’éco-conception, nous dirions que c’est l’art de mettre en œuvre le minimum de moyens pour arriver au résultat désiré.
Quelques liens
Mots clés : Coupe, Eurobot 2022
Match 5 - Coupe de France 2022
13 juin 2022
La préparation
Nous voulons jouer prudents, et ne pas nous retrouver bloqués dans la même situation qu’au match précédent.
Nous collons une bande de papier sur notre mât balise pour éviter d’être invisible pour un autre robot.
Nous allons rajouter une trajectoire pour s’échapper d’un cas similaire et surtout indiquer à notre robot de ne pas s’acharner. S’il rencontre un robot face à lui sur le chemin vers les carrés de fouilles, il n’insiste plus, il va déposer la statuette.
L’autre point vient des carrés de fouille eux même. Notre précision est parfois trop mauvaise et nous voulons y remédier. Nous ajoutons deux capteurs de proximité (un seul servira) pour détecter le premier carré de fouille. c’est une modification notable et pour ne pas prendre de risque nous la testons bien. Même, nous ne l’utilisons que du côté jaune pour simplifier les tests.
Et puis, nous travaillons enfin sur ces échantillons que nous n’arrivions pas à attraper. Au lieu d’utiliser la chambre à air, nous utilisons des élastiques pour assurer une bonne adhérence entre notre robot et les échantillons.
Le match
Nous tombons jaune et allons pouvoir tester notre nouveau code en conditions réelles !
Le robot attrape la statuette, attrape les deux échantillons et dépose la statuette. Celle-ci ne bascule pas mais se retrouve quand même bien positionnée dans la zone de dépose.
Le code pour détecter les carrés de fouille s’active et le robot semble bien se comporter, même si la lecture du carré de fouille semble échouer.
Vient ensuite la rencontre du robot adverse. Nous l’apprendrons après le match, leur robot s’est décalé, il a détecté un échantillon mal tombé comme la bordure. Le robot vient donc bien loin dans notre zone et nous entendons un petit choc. Le robot adverse pousse notre carré avec une croix rouge...
Mais après ce choc, les deux robots se suivent et remplissent leurs missions en s’évitant honorablement !
Et à 1"48, le robot par vers la zone de dépose de la statuette et vous nous entendez dire "Oh non, oh non, oh non !". Le robot embarque avec lui un échantillons qui va se bloquer entre lui et la zone de dépose. Il arrivera à activer la vitrine, mais la dépose de la statuette ne nous rapportera pas de point : elle dépasse de la vitrine !
Pour plus de détails, regardez l’échantillon vert sur la vidéo, comment, sournoisement, étape par étape, il se déplace pour nous bloquer !
Le robot affiche le score qu’il pense avoir fait, soit 86 points alors qu’il n’en a marqué que 71.
Ce qui nous rapporte 79 points pour ce match et nous maintient 10e !
La vidéo est disponible en 720p ici (mp4 - 25 Mo).
Mots clés : Coupe, Vidéo, Eurobot 2022, Match
UART sur Raspberry Pi
12 juin 2022
Nous avons repris notre installation du Raspberry Pi pour activer le Bluetooth. Ce fut l’occasion de comprendre la structure des UARTs sur le Raspberry PI, car oui, les deux sont liés !
Si vous voulez comprendre le lien entre UART et Bluetooth, si vous voulez comprendre la différence entre
C’est probablement aussi un bon article pour démarrer avec l’UART sur le Raspberry Pi !
page précédente 1 ... 7 8 9 10 11 12 13 14 15 ... 37 page suivante
Administration du site