Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
Après la Coupe 2025
29 juin 2025
Voilà un mois que la coupe 2025 s’est terminée. C’était pour nous une coupe très particulière. En effet, nous étions grandement impliqués dans les deux équipes "Riombotique", au point d’avoir décidé de ne pas réaliser de robot pour Poivron Robotique cette année. C’est une expérience totalement différente avec énormément de trucs chouettes et quelques écueils qui nous ont fait mal.
L’une de nos conclusions, c’est que nous aimons notre équipe "Poivron Robotique". Mais Poivron Robotique c’est quoi ? Notre équipe n’est pas la seule à se poser ce genre de questions existentielles, vous avez Les Karibou qui présentent leurs réflexions à ce sujet.
En très bref, Poivron Robotique est bâti sur deux axes : maîtriser les technologies que nous utilisons et écrire des articles les présentant. Le détail de nos réflexions se trouve sur notre page Présentation.
La suite
Poivron Robotique sera probablement présent à la coupe de France de Robotique 2026. Nous travaillons toujours - bien qu’avec moins d’acharnement - sur nos articles sur le déplacement d’un robot.
Après des échanges avec différentes équipes, nous allons troquer notre bus de communication I2C pour un bus USB. Ce qui amènera probablement un ou plusieurs articles sur l’USB. Nous cherchons également à stocker nos logs, pour enregistrer massivement ce que se passe sur le robot. Enfin, nous cherchons un moyen de mieux comprendre l’environnement du robot à partir des capteurs VL53L8CX. Nous avons bien quelques idées mais rien d’abouti pour l’instant.
L’été s’annonce chargé et j’espère que nous reprendrons le rythme de publication que nous avions les années précédentes !
Bonne année 2025
15 février 2025
Nous profitons de cette nouvelle année pour présenter, tardivement, nos meilleurs vœux pour cette année 2025.
Après une année 2023-2024 bien chargée, nous levons un peu le pied, ce qui explique cette activité éditoriale bien plus faible.
Cependant, plus faible ne veux pas dire inexistante ! Nous préparons une série d’articles sur le déplacement des robots qui sera publiée sur ce site quand elle sera prête, et pas avant. Si vous êtes curieux, ou que vous souhaitez participer à la rédaction de ces articles, notre bouillon (qui commence à prendre forme) est en ligne sur ce le wiki Eurobot.
Nos projets se concentrent sur les activités du club robotique de Riom. Ces activités nous amèneront probablement à publier des articles mais pas les points d’avancement que nous partagions habituellement sur ce site...
Bref, nous sommes toujours là, mais moins actifs ici !
La coupe de France de Robotique 2024 - le bilan
19 mai 2024
Après une participation à la Coupe de France de robotique puis une participation à la Coupe d’Île de France, la fin du projet appelle un bilan et comme tous les ans, nous terminons ce projet avec une sensation d’inachevé.
Notre projet était ambitieux et supposait que nous partions d’une base solide - notre robot de l’année précédente.
Globalement, le travail réalisé cette année manquait de fiabilité :
- La prise des pots était délicate et comptait énormément sur l’odométrie du robot. En l’absence de capteur dédié, le robot ne pouvait que supposer qu’il avait attrapé un pot.
- La prise des plantes a gagné en fiabilité, ajustement après ajustement, mais avait parfois encore des ratés
- Même la dépose des plantes ou relâcher un pot n’était pas fiable à 100%
Le robot de l’an dernier avait bien un ou deux soucis, tels que :
- un plantage de la communication I2C ;
- un plantage dans la lecture du gyroscope.
Nous avons observé ces soucis sur le robot de cette année également, dans une moindre mesure, certes, mais ces problèmes sont toujours présents. Et cette année, en plus, le robot pouvait redémarrer de manière "aléatoire". Nous ne l’avons observé que quelques rares fois en essais, mais une fois à notre dernier match de la coupe d’Île de France.
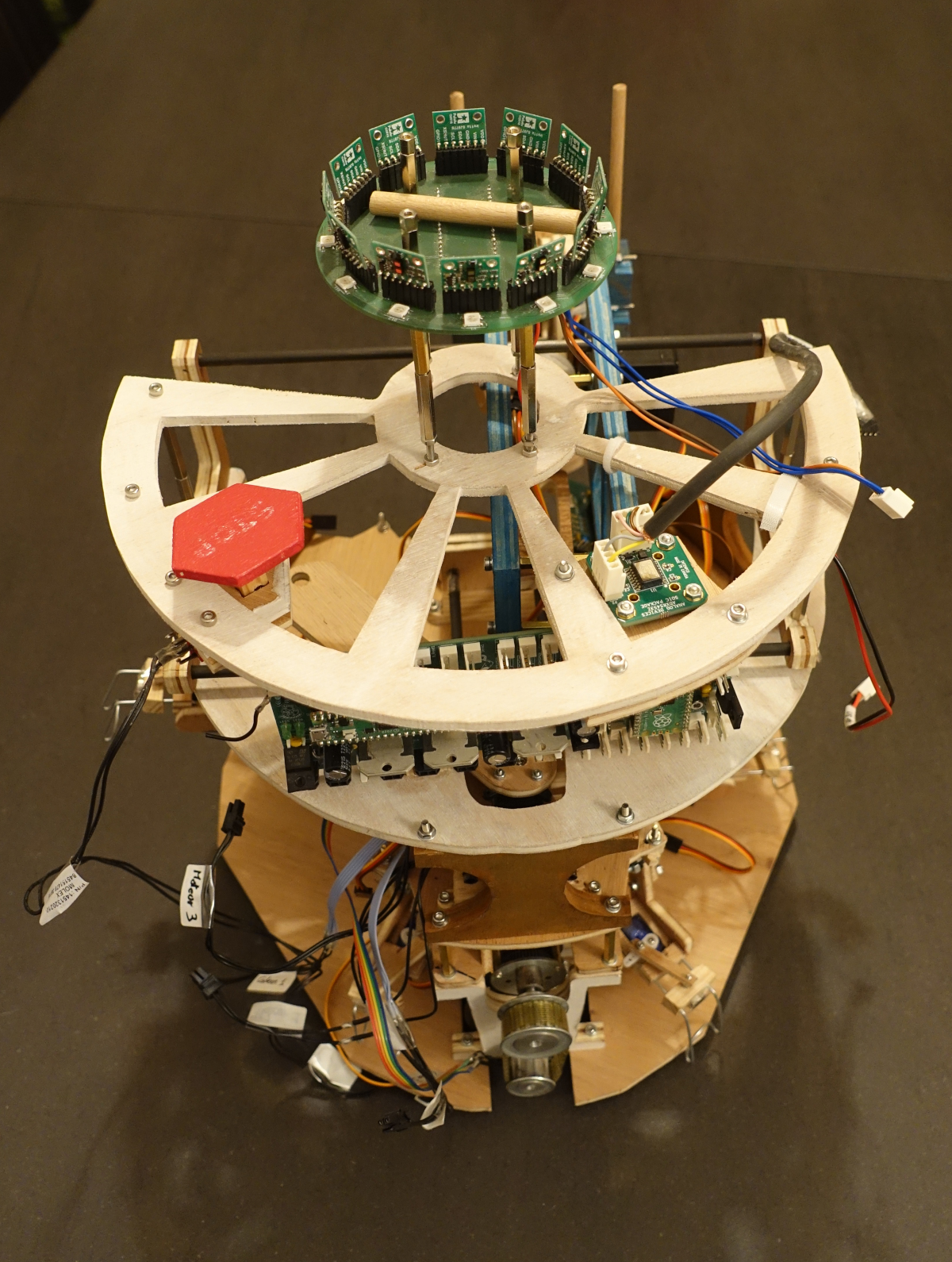
Vue arrière du robot (mars 2024)
Côté PAMI, c’est un peu le même constat. Nous sommes partis du code de déplacement du robot principal. Ceci nous a montré à quel point le code était réutilisable - et ça nous a fait vraiment plaisir ! Par contre, quand vous réglez l’asservissement la veille de la compétition, évidemment que le robot manque un peu de maturité. Nous nous sommes fait avoir par :
- les boutons de sélection de couleur qui ont lâché les uns après les autres. Probablement à cause des efforts sur les contacts dû au manque de place sur le PAMI ;
- la gestion des multiples tirettes et le départ différé. Un faux contact et votre PAMI s’enclenche. Au bout de 90s, il ne bouge pas, car il y a un autre PAMI devant lui. Quand les autres PAMIs partent, ils restent coincés derrière celui qui a fait un faux départ.
- la gestion des piles. Nous avons limité nos essais pour ne pas vider nos batteries puis à la coupe d’Île de France, nous avons remarqué que notre chargeur de piles rechargeables était défectueux.
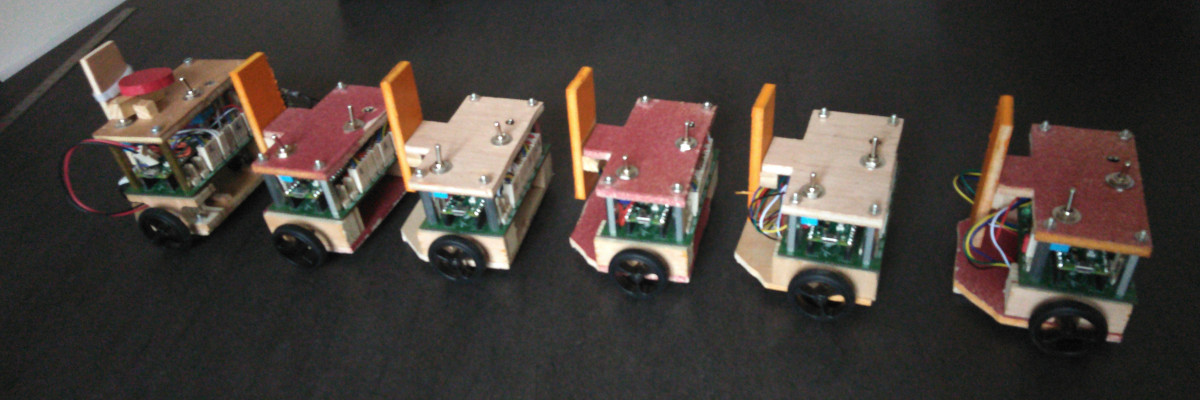
Les PAMIs juste avant le départ
Donc, oui, il y a des raisons d’être insatisfaits de nos robots.
Et de l’autre côté, nous avons rempli nos objectifs :
- la manière d’attraper les pots était unique et n’était accessible qu’à un robot holonome ;
- le robot a offert un vrai spectacle sur les tables de matchs ;
- peindre le bois a rendu le robot plus lisible ;
- nos PAMIs sont trop mignons - objectivement ;
- les trajectoires courbes de nos PAMIs étaient classes.
Bref, nous espérons avoir quand même vendu du rêve, car c’était un de nos buts !
Alors pour fêter ça, voici une vidéo des meilleures actions du robot :
La coupe de France de Robotique 2024 - la compétition
19 mai 2024
Compétition - J1 - Mercredi
Nous arrivons donc à la compétition avec un robot qui pourrait marcher mais qui ne marque pas forcément de points et un PAMI non-homologable.
Nous travaillons d’abord sur le PAMI, et relativement rapidement nous obtenons un PAMI homologable (tirette, bouton de couleur, ajustement de l’asservissement).
L’après-midi sera consacrée à l’activation des panneaux solaires avec un bras tenant un pot. Vers 15h30, nous nous dirigeons vers l’homologation. 15h40, nous sommes homologués.
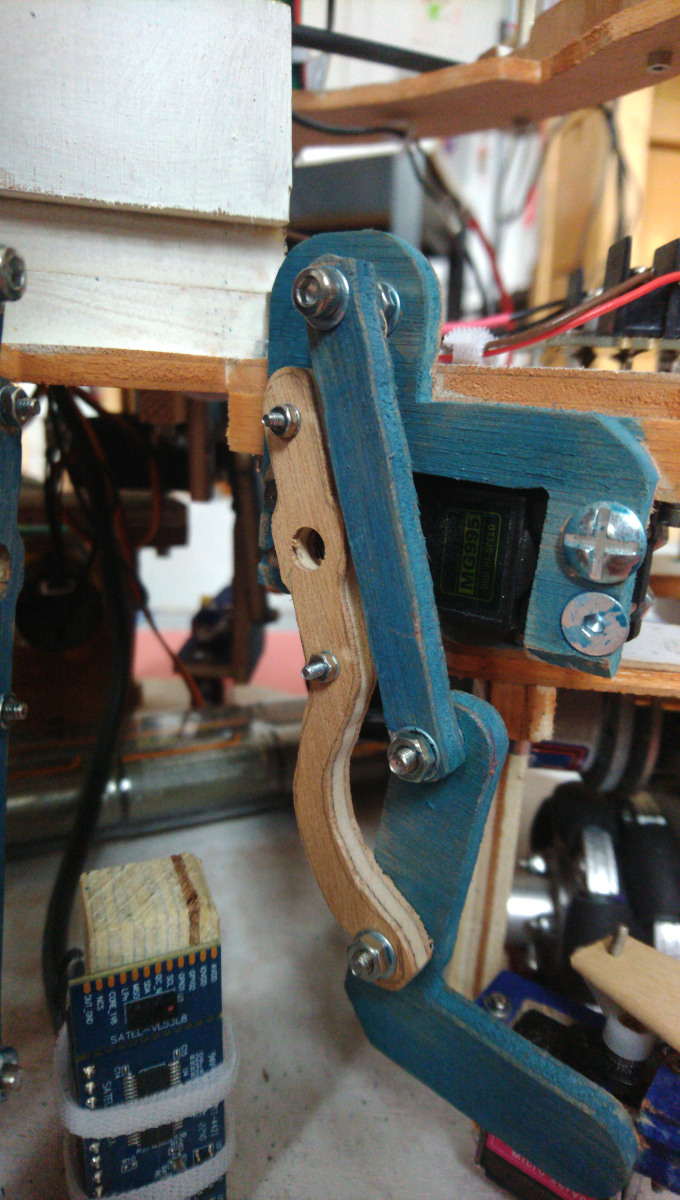
Il nous reste donc du temps pour travailler sur le robot ! Et ça tombe bien car nous avons du travail ! Les servomoteurs nous posent toujours des soucis et nous découvrons que celui de la pince chauffe. Nous sortons alors notre scie à chantourner et nous installons un gros servomoteur à la place du petit qui actionnait la pince.
Rappelez-vous, notre grappin ressemblait à ça :
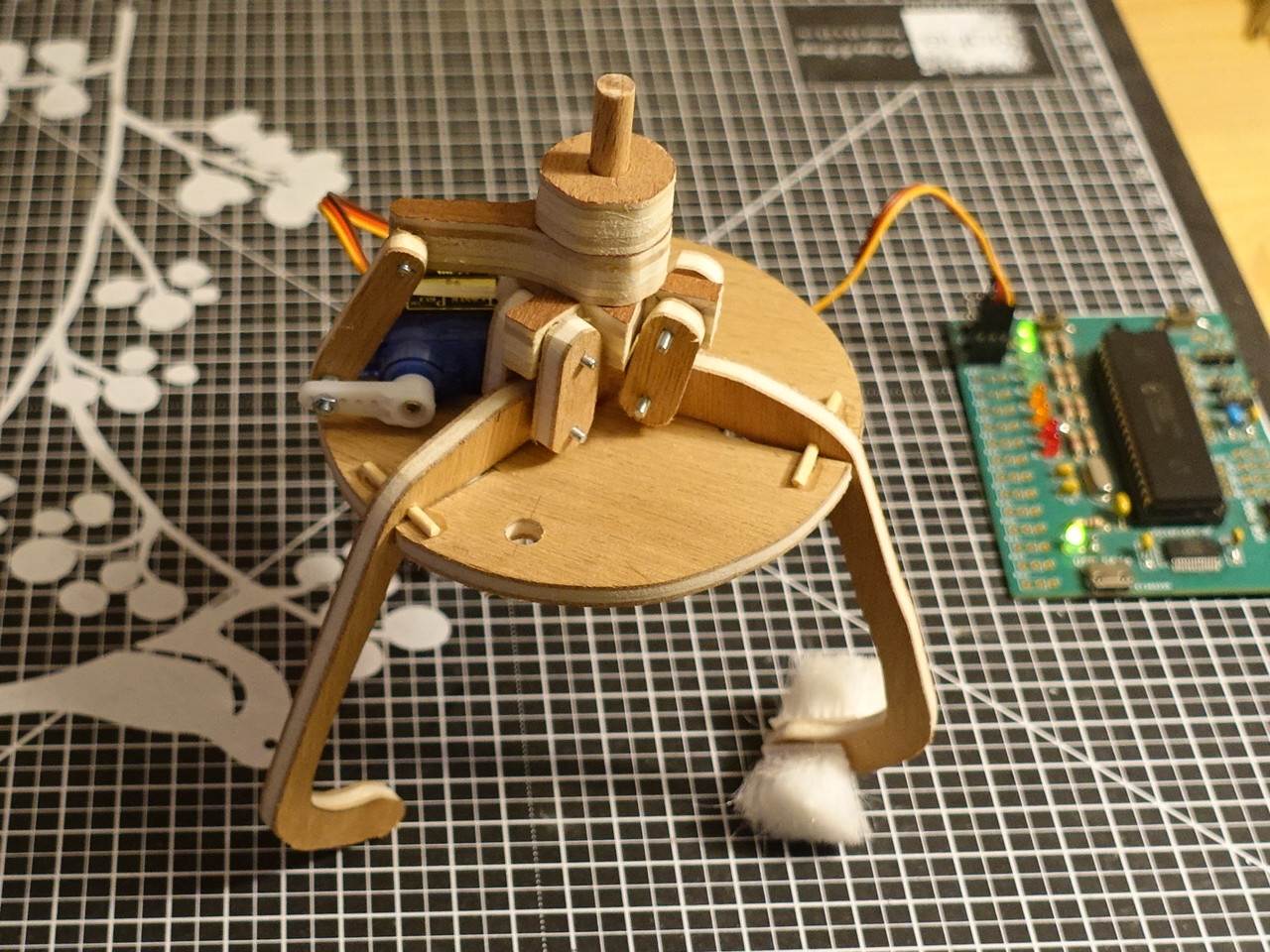
Le grappin !
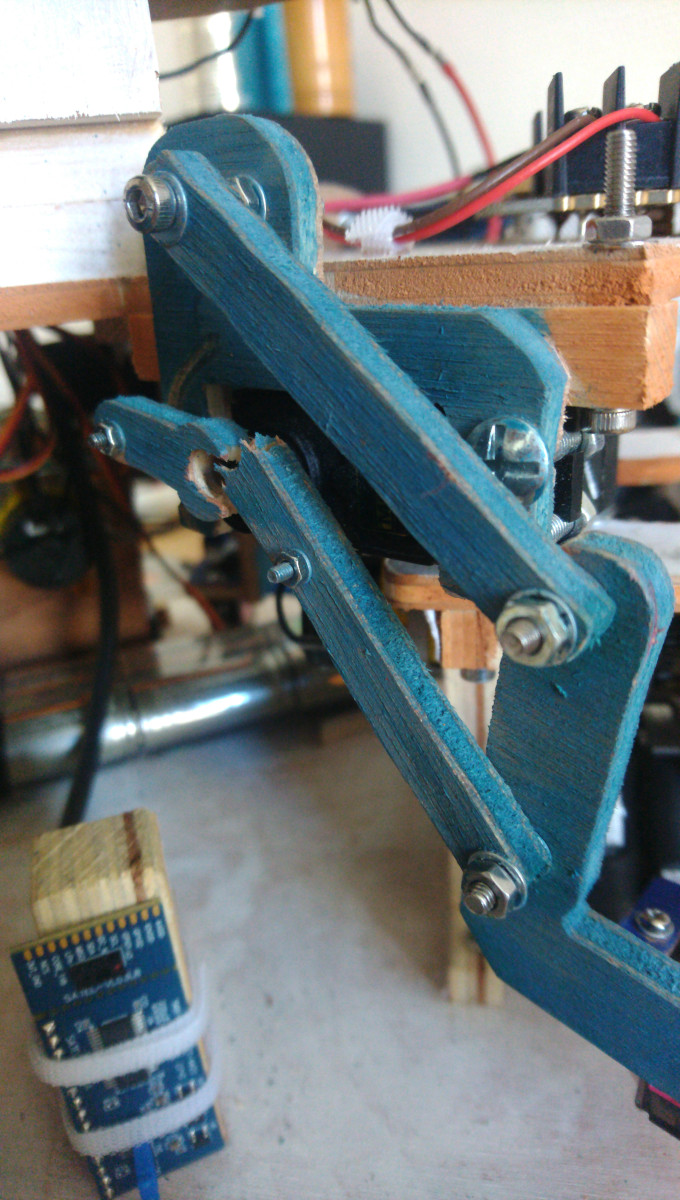
Maintenant, c’est moins élégant, mais plus fonctionnel :
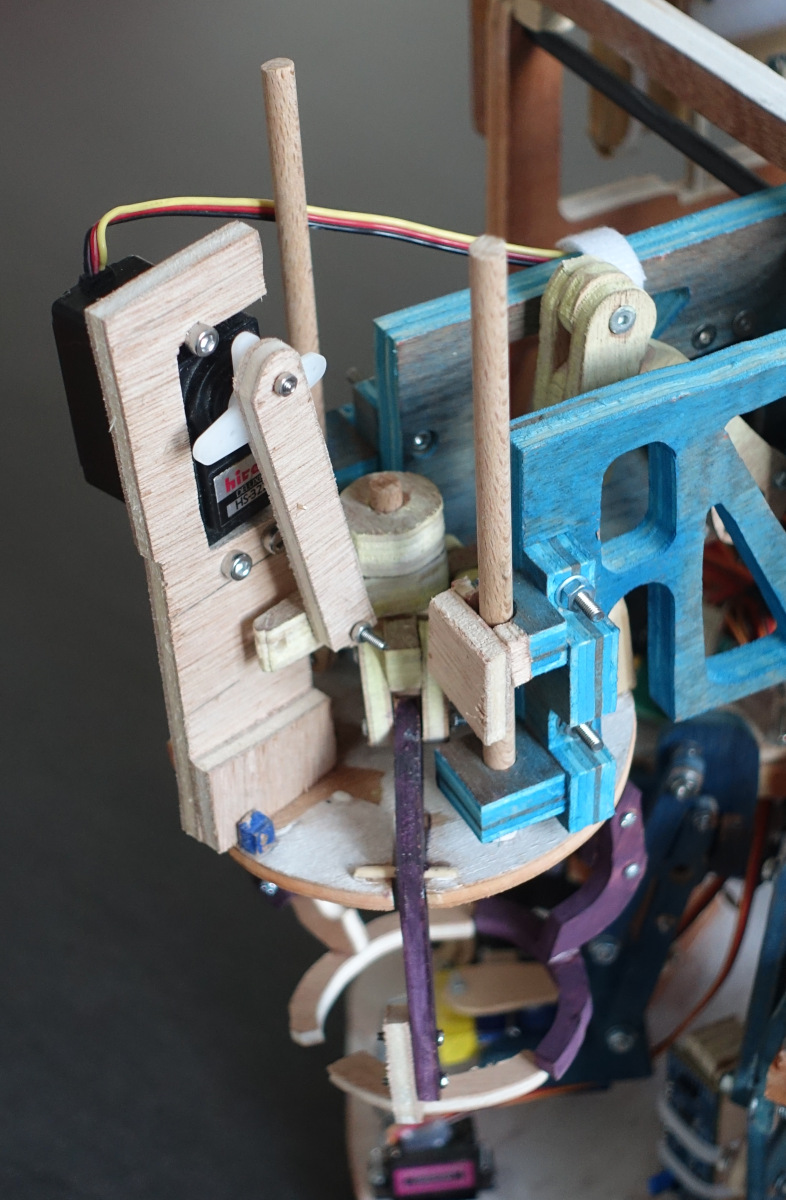
Grappin avec un gros servomoteur
Grappin avec un gros servomoteur
Le fonctionnement global des servomoteurs semble s’améliorer à partir de ce moment.
Compétition - J2 - Jeudi
Nous attaquons notre premier match avec sérénité. Le robot ne va pas faire des merveilles, nous le savons. Nous sommes du côté Jaune, celui sur lequel nous ne nous sommes quasiment pas entraînés.
Le robot n’attrape que 3 pots sur les 5. Il tente de pousser les panneaux solaires avec un pot, les rate tous puis en tourne un en allant chercher une plante. Le robot attrape une plante et la met sur un bras qui n’avait pas attrapé de pot. Au deuxième essai, le robot n’arrive pas à attraper la plante et rentre déposer ses pots. Il embarque par hasard une plante violette qui restera debout dans la zone de dépose. Il traverse ensuite le terrain pour aller se recharger. Notre PAMI parcourt nominalement ses 80 cm.
Nous marquons 41 points face à Ze Crazy Team (66 points - leur robot était bien abouti, bravo à eux !).
- 1 plante : 3 points
- 1 panneau solaire : 5 points
- Zone de recharge : 10 points
- Estimation du score : 17 points
- PAMI : 5 points
- non forfait : 1 point.
Match 1 - 720p (61Mo) ou sur Youtube : Match 1
Nous profitons du temps entre les matchs pour homologuer les PAMIs 2 et 3.
Pour ce deuxième match, nous mettons 3 PAMIs sur la table en plus du robot. Le robot attrape parfaitement les pots, pousse avec succès les 3 panneaux solaires, tente d’attraper une plante - sans succès - puis dépose ses pots avant d’aller en zone de recharge. Le PAMI 1 fonctionne bien, le 2 a fait grève et le troisième s’est retrouvé bloqué par le 2e.
Pour le deuxième match, nous marquons 51 points face à AREM (qui ne quitte pas sa zone de départ).
- 3 panneaux solaires : 15 points
- Zone de recharge : 10 points
- Estimation du score : 20 points
- PAMI : 5 points
- non forfait : 1 point.
Match 2 - 720p (18Mo) ou sur Youtube : Match 2
Nous finissons le match vers 16h30. Il nous reste toute la soirée pour atteindre notre objectif : attraper une plante et la mettre dans un pot. Et quitte à modifier la stratégie, autant en profiter pour évacuer le robot du chemin des PAMIs. Car actuellement, si le robot rencontre un obstacle sur le chemin de la recharge, il se dirigera vers la zone proche des PAMI.
La soirée sera longue :
- Changement de la zone de départ avec re-calibration de l’attrapage des pots
- Modification de l’asservissement du robot sur les plantes, nous divisons par deux la vitesse d’approche, ce qui améliorera nettement la chance d’attraper une plante
- En cas d’échec, le robot ne rentre plus directement à la zone de dépose, il tente sa chance sur d’autres zones contenant des plantes
Compétition - J3 - Vendredi
Notre troisième match sera un match en demi-teinte. Le robot attrape ses deux pots avants et seulement un pot à l’arrière. Il va ensuite attraper une plante dans la première zone. En fait, il en attrape deux. L’une tombe dans le pot, l’autre devant le robot et se couche. Rapidement, le robot détecte qu’il ne pourra pas attraper une seconde plante dans cette zone et va tenter sa chance vers une autre zone de plantes. Il attrape une 2e plante puis échange ses pots avants avec ses pots arrières. Il va chercher sa troisième plante, l’attrape, mais la pose dans le bras qui n’a pas de pot, la plante se couche devant le robot. Le robot semble tenter d’aller à la troisième zone, mais la plante est bloquée devant le capteur, il rentre à sa zone de dépose.
Mais il ne dépose pas ses plantes !
Le code de fin de match s’enclenche et le robot abandonne son action pour aller vers la zone opposée, laissant ainsi la place aux PAMIs. S’il marque les points de la zone de recharge, ce n’est que grâce à un bras déplié. Les PAMIs de leur côté cafouillent. Le premier part comme s’il était de la couleur opposée, les suivants ne bougent pas.
En termes de mouvement, c’est un match magnifique, notre plus belle action réussie, un robot en mouvement jusqu’à la dernière seconde. En termes de points, c’est juste la déprime totale :
- Zone de recharge : 10 points
- Estimation du score : 10 points
- non forfait : 1 point.
Match 3 - 720p (32Mo) ou sur Youtube : Match 3
Évidemment, un point pareil, nous le réglons avant le prochain match ! Ce temps entre les matchs sera pour nous l’occasion de faire homologuer un 4e PAMI.
Le quatrième match sera assez similaire au 3e, à 3 détails près :
- Le robot dépose sa récolte dans la zone de dépose
- Le robot tente de traverser le terrain, mais n’arrive pas à sa zone de recharge avant les 90s. Il s’arrête à 10 cm du but
- Les 4 PAMIs partent et marquent des points
Nous marquons 37 points :
- 2 plantes dans leur pot : 8 points
- Zone de recharge - échec : 0 point
- Estimation du score : 8 points
- PAMI : 20 points
- non forfait : 1 point.
Match 4 - 720p (32Mo) ou sur Youtube : Match 4
C’est bien, c’est le premier match où nous marquons des points avec des plantes ! Nous avons grandement fiabilisé le robot, rajouté des PAMIs sur la table et marqué moins de points qu’au match 1 ou qu’au match 2.
Là, c’est le conseil de guerre ! Nous avons largement de quoi marquer 70 points sur la table et nous n’avons à peine fait la moitié. Nous relisons le règlement, faut-il vraiment arrêter le robot à 90s ? Réponse : non !
La soirée, puis la nuit, seront longues :
- Nous changeons aussi la fin de la stratégie. Plus question de traverser la table, nous restons sur notre demi-table
- Nous tentons d’activer les panneaux solaires en fin de match, dans la séquence de dépose des plantes.
- Nous rajoutons un recalage pour assurer notre précision lors de l’activation des panneaux solaires.
Nous allons nous coucher après avoir testé le robot sur trois tables d’essai différentes.
Compétition - J4 - Samedi
Pour la première fois, le robot attrape une troisième plante pour la mettre dans son pot. C’est peut-être un détail pour vous - 4 points, ce n’est pas énorme - mais pour nous, ça veut dire beaucoup ! Cette troisième plante justifie d’attraper plus que les 2 premiers pots, cette troisième plante justifie cette séquence d’inversion des pots... Bref, c’est un peu l’accomplissement de notre projet.
La suite sera un peu moins glorieuse. Nous avions calibré le robot sur les tables d’essai où il glissait plus que sur les tables de match. Il ratera ses 2 premiers panneaux solaires et frôlera le troisième (assez pour marquer les points). Les PAMIs vont encore se planter. Le premier atteint son objectif tandis que les quatre suivants vont se pousser, suffisamment pour qu’un second arrive à la jardinière la plus proche, mais ce sera bien par chance.
Nous marquons 57 points face à ARC :
- 3 plantes dans leur pot : 12 points
- Zone de recharge : 10 points
- 1 Panneau solaire : 5 points
- Estimation du score : 19 points
- PAMI : 10 points
- non forfait : 1 point.
Match 5 - 720p (32Mo) ou sur Youtube : Match 5
Un petit mot sur les PAMIs. S’ils n’ont pas brillé cette année, c’est pour plusieurs raisons :
- Le démarrage par tirette posait souci. C’est le même système que le gros robot, mais ces PAMIs sont bien plus légers, ils avaient tendances à être soulevés par la tirette.
- 1 tirette, ça va, 5, bonjour les dégâts. En partant en ligne, sur les derniers matchs seul le premier PAMI avait une tirette, les autres détectaient le départ du PAMI précédent.
- Le départ l’un après l’autre garantissait un effet boule de neige en cas de problème. Mais c’était plus pratique et surtout plus joli !
- Le bouton "couleur" - ou de sélection de l’équipe - a dysfonctionné sur 4 des 5 PAMIs.
Au classement, nous finissons 39e sur 97 équipes homologuées et avant-dernier des équipes Légendes 15e sur 16. C’est donc pour nous la fin de la compétition !
Quel bilan en tirons-nous ? Vous le saurez dans notre prochaine brève !
La coupe de France de Robotique 2024 - la fin de la préparation
14 mai 2024
Et voilà, c’est terminé... Après 4 jours de défis intenses, de stress et de rencontres sympathiques nous voici de retour chez nous. Mais que s’est-il passé durant ces quatre jours ? Et pourquoi ?
Pour répondre à ces questions, nous allons reprendre l’histoire au 23 avril.
J-14 avant la compétition
Bien que nous ne l’ayons pas publié, nous avions également réalisé des essais pour attraper les plantes. Ces plantes sont des éléments assez sensibles, il est facile de les coucher. Elles ont aussi la fâcheuse manie de se regrouper lorsque le robot se rapproche (il les pousse). Une fois regroupées, il n’est plus possible de les attraper avec la pince à 3 doigts. Le robot en prend 2 ou même trois et ça devient le bazar.
Nous fixons alors un petit doigt sous le châssis pour saisir la plante, la reculer et l’isoler de ses congénères. Cette solution améliore grandement la saisie des plantes.
Nous avons donc une saisie des pots qui marche et une saisie de plante qui n’est pas affreuse.
J-10 avant la compétition
Nous faisons quelques démonstrations devant des amis, il parait maintenant flagrant que le robot n’attrape correctement une plante qu’une fois sur 3 ou 4. Pire, s’il n’attrape pas la plante, il part doucement dans le décor. Nous profitons d’un après-midi pour identifier les défaillances et gérer ces cas plus proprement.
Nous avons maintenant un robot qui rentre à une zone de dépose dans quasiment tous les cas, avec ou sans plantes...
J-8 avant la compétition
Nous rajoutons les bordures au terrain - regardez la vidéo précédente, vous verrez que les pots ne sont pas bloqués par la bordure. Ceci nous oblige à retravailler un peu la séquence de prise des pots. Notre mécanique est loin d’être parfaitement symétrique, nous réglons alors la distance de prise des pots pour chaque bras.
De plus, nous avions un système de calage automatique du robot : nous le posions sur le terrain dans une orientation approximative et il se mettait tout seul en position grâce à son capteur. Nos essais nous ont montré que ce système n’était pas assez répétable. Le robot pouvait se décaler jusqu’à 2 centimètres - rédhibitoire pour attraper les pots !
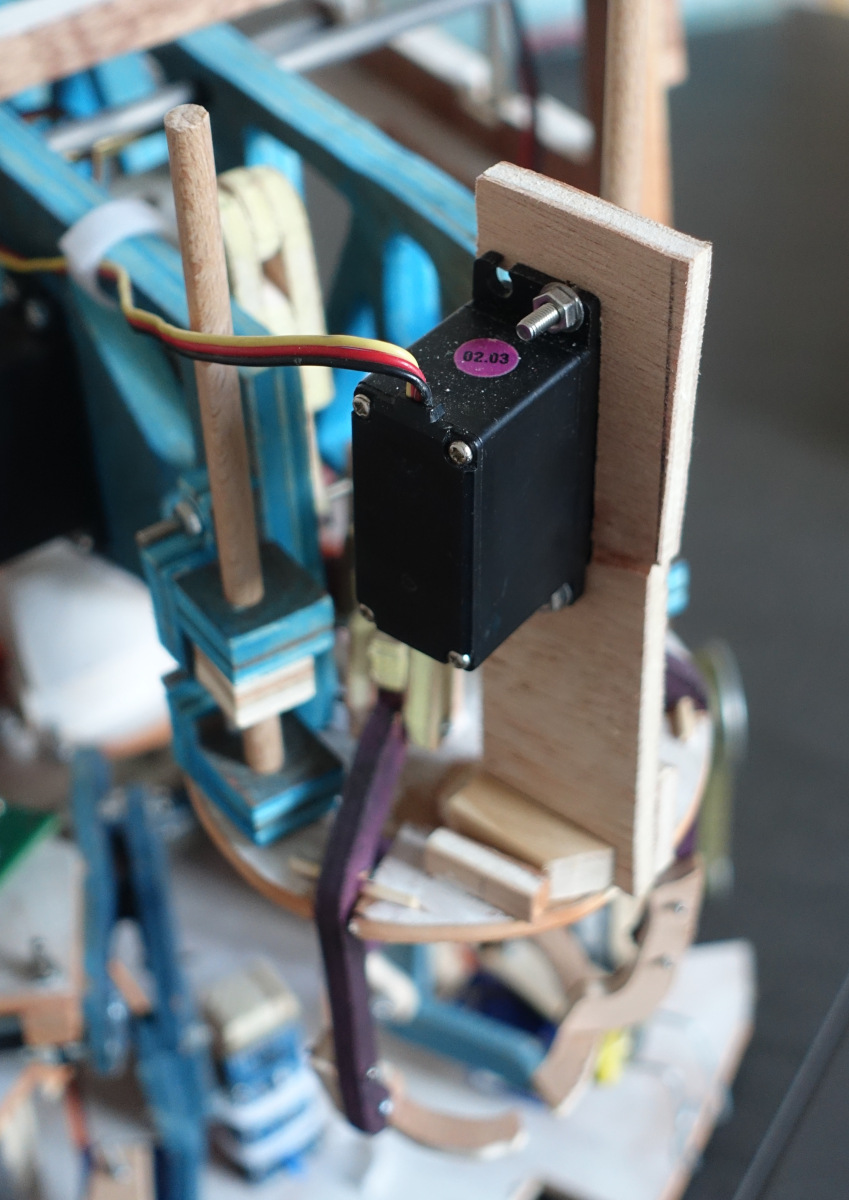
Petite mésaventure, un fil du câble d’un servomoteur se détache du servomoteur : démontage sur servomoteur, ouverture du boîtier, re-soudage du fil, remontage et noyage du tout dans le pistocolle...

Câble du servomoteur
Et voilà, il ne nous reste plus qu’un week-end avant la coupe et nous sommes loin d’enchaîner les essais pour fignoler la stratégie.
J-4 avant la compétition
Notre code se compose d’une vingtaine de cas de test, qui nous ont permis de travailler jusqu’à présent. Maintenant, nous devons absolument commencer le code principal, tenant compte de la "couleur" du robot - qui influe sur sa position de départ - et de la tirette - qui conditionne le départ du robot. Des "détails" qui peuvent réserver leurs surprises.
Mais avant, nous avons un dernier mouvement à programmer. Le robot est conçu pour pouvoir lâcher ses pots, tourner sur lui-même et les re-saisir. Du moins c’était notre ambition initiale. Quelques essais montrent que ce ne sera pas possible exactement comme ceci. Lorsque le robot lâche un pot, celui-ci s’éloigne du robot. Les bras sont alors trop courts pour récupérer les pots sans déplacer le robot. Vu la situation, nous travaillons sur un échange entre les deux pots avants (potentiellement remplis d’une plante) avec les pots arrières.
Dans l’après-midi, nous organisons une séance PAMI. Avec de l’aide, nous découpons les dernières pièces des PAMI, soudons les câbles, assemblons les petites bêtes. Mais la tâche est un peu plus ardue que prévu, la carte électronique ne se monte qu’en force et il faut dessouder une broche du microcontrôleur à cause d’un problème de conception de la même carte.

Nous finissons la journée avec des PAMI montés mais pas testés...
Les PAMIs juste avant le départ
J-3 avant la compétition
Nous enchaînons les essais et le comportement du robot se dégrade, essai après essai. Il n’arrive plus à lâcher les pots, les servomoteurs n’ont plus la force de décoller les aimants des pots. Puis même à vide, les doigts ne bougent plus. Les servomoteurs des doigts, ceux qui font avancer et reculer les aimants se mettent à "croustiller". Nous remplaçons nos servomoteurs à pignons en plastique par des servomoteurs avec des pignons métalliques.
Puis l’un servomoteur à pignons métalliques refuse de bouger, ou a la tremblotte à certains moments. Nous vérifions les branchements plusieurs fois, ce qui semble améliorer la situation. Avant qu’elle n’empire à nouveau.
Nous contrôlons alors la mécanique des doigts et, effectivement, certains doigts forcent plus que d’autres. Nous corrigeons ceci en ajustant la forme du fils de fer qui guide l’aimant tenu par le servomoteur. Et la situation s’améliore...
Autre problème, le translateur, ce bloc qui tient la pince et son ascenseur, qui lui permet de se positionner au-dessus des pots, ne va plus au bout de sa course. Là, il nous faudra qu’une heure ou deux pour comprendre que nous devons re-lubrifier les axes régulièrement. Les axes sont en carbone (baguettes de cerf-volants ) et le translateur en bois. Nous les avions lubrifiées avec du PTFE en bombe. C’est efficace, mais pas très pérenne. Nos gardons quand même cette solution et notant bien de prendre le lubrifiant avec nous. (Il faudra que nous soyons à la compétition pour réaliser que nous ne secouions pas assez la bombe et que nous ne projetions que des traces de PTFE sur les axes du translateur...)
J-2 avant la compétition
Maintenant, il faut vraiment écrire un bout de code pour l’homologation, prenant en compte la tirette et la couleur de départ du robot ! Mais avant, nous réalisons un ou deux tests et nous cassons un morceau de bras !
Bras cassé
La réparation sera heureusement rapide !
Bras réparé - mais pas repeint...
Nous continuons nos essais et rapidement nous avons le robot qui se "plante", moteurs arrêtés, le reste semblant fonctionnel. Nous avions déjà vu ce phénomène mais nous l’avions négligé. Après avoir vérifié la tension de la batterie, nous branchons le PC sur le robot et découvrons avec stupeur que le robot est en train de redémarrer. En réalisant ce branchement, nous frôlons le régulateur de tension qui nous parait excessivement chaud par rapport à la puissance consommée estimée. Après avoir inspecté la carte et ses branchements dans tous les sens, nous modifions deux choses sur le robot :
- Nous alimentons la carte de détection - avec ses diodes RVB - directement depuis notre carte de puissance (et non plus en passant par notre carte principale).
- Nous fixons un radiateur sur le convertisseur de tension.
En fin de journée, nous avons un code qui permet au robot d’attraper les pots, chercher des plantes dans une zone de plante, rentrer à une zone de dépose et déposer ses pots (potentiellement garnis de plantes).
Le code est fiable dans le sens où le robot réalise ces actions sans partir dans le décor. Mais il est loin d’attraper systématiquement une plante !
C’est également le moment de s’assurer que l’affichage du score marche bien... Et c’est un échec. Le code de la gestion de l’écran et celui de la lecture du capteur à l’avant, qui détecte les plantes, semblent entrer en conflit. Vu notre avancement, nous remettons un code qui gère le score, affichons "25 points" sur l’écran e-ink, et rebasculons sur le code qui ne gère que le capteur. Le robot affichera 25 points du début à la fin de la compétition.
J-1 avant la compétition
Fiabilisation du code ? Avancée sur la stratégie ? Que nenni !
Nous chargeons la voiture le matin et voyageons l’après-midi ! Nous avons seulement un peu de temps le soir, qui sera consacré à l’asservissement des moteurs du premier PAMI.
Mots clés : 2024, Coupe, Essais, Mécanique, Mini robot (PAMI)
Administration du site