Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
Coupe de France 2023 - Match 3
1er juillet 2023
Nous sommes perdus. Nous ne comprenons plus rien. Pourquoi le robot s’est mis à tourner sur lui-même alors que le gyroscope était désactivé ?
Perdus mais motivés, nous reproduisons les erreurs plusieurs fois de suite à la coupe. Besoin d’en avoir le cœur net, nous rentrons à notre hébergement pour tester le robot dans un autre environnement. Et là, les problèmes disparaissent. Ce n’est donc pas le gyroscope qui nous laisse tomber, ou un problème de code pur.
Nous faisons des essais, démarrant et stoppant tous les moteurs du robot à répétition pour tester la fiabilité du robot. Nous dédions une LED aux erreurs du gyroscope et montrons que les soucis viennent effectivement de lui. Nous analysons deux types d’erreurs venant du gyroscope. La première est liée purement à la communication. Nous rendons le code plus robuste à cette erreur. Nous retournons à la coupe et nos essais montrent une amélioration. Mais ça ne suffit pas !
Il faudra attendre 1h du matin pour remarquer qu’en démarrant côté vert, nous obtenons systématiquement une toupie à un endroit précis de la stratégie. Ici, c’est Teleplot ❤ qui nous montre que la consigne d’orientation du robot passe instantanément de +Pi à -Pi. Nous avions tout d’abord codé nos angles en dur, puis nous avions créé une fonction pour calculer l’angle optimal tenant compte de l’orientation du robot et de l’orientation souhaitée. Cette fonction avait été déployée presque partout. Presque... Et c’est là que se trouve la faille.
Nous allons nous coucher sachant que nous avons réglé les plus gros problèmes, mais qu’il reste des erreurs aléatoires.
Nous gardons notre stratégie prudente, n’osant pas aller se balader sur le terrain...
Le match se déroule de manière nominale.
Nous marquons 67 points et nous nous plaçons 12e.
Match 3 (480p - 8 Mo | 720p - 16 Mo).
La suite : Coupe de France 2023 - Match 4
Coupe de France 2023 - Match 2
1er juillet 2023
Juste après le Match 1, nous réglons le problème de nos balises. Nous ne lisions pas le statut du capteur avant de prendre en compte la distance renvoyée. La correction fait 4 lignes et règle nos soucis.
Et disons-le clairement, à partir de là, ça va mal. Les essais sur table s’enchaînent et montrent quasi systématiquement le même problème : le robot se met à tourner sur lui-même, apparemment sans raison, au milieu de ses trajectoires. Le temps passe et toujours pas de solution en vue. Vu nos trajectoires, le robot pourrait fonctionner sans le gyroscope, se basant uniquement sur les codeurs de ses roues. Le code est déjà prêt car pour tester rapidement, nous utilisons ce mode qui nous permet de sauter les 10 secondes d’initialisation du Gyroscope.
Nous aurions pu être sereins, si après avoir été appelé pour partir en match, nous ne découvrions pas que notre servomoteur qui dose les balles pour les envoyer dans le panier vient de rendre l’âme.
Nous en branchons un à la place, perçons le pignon pour le raccorder au mécanisme, alimentons le servomoteur pour qu’il se mette en position et fixons le pignon. Nous noyons le servomoteur avec le pisto-colle pour le fixer en lieu et place de l’ancien.
Nous arrivons au match sans être sereins, en mode fébrile même ! Les ajustements de stratégie se poursuivent en arrière scène... Et nous affrontons le RCT, une sacrée équipe.
Le robot part, lance ses 10 cerises dans le panier, aspire les 10 suivantes et part en tournant sur lui-même !
Il reprendra un comportement normal, mais en étant trop décalé pour lancer les cerises dans le panier. Son orientation a pris 90° d’erreur. Il tire sur notre adversaire. Ensuite, il va jouer une séquence d’attrapage de cerise et de lancement vers le panier en étant totalement décalé. Il en vient à se rapprocher de l’équipe adverse et nous faisons signe à l’arbitre de le stopper.
Là où nous avons de la chance, c’est que les arbitres comptent nos points. Avec des cerises lancées hors du panier, mais un déguisement déclenché par la force centrifuge, le robot estime un score pas si loin de la réalité. Nous marquons 43 points et terminons 15e au classement général.
Match 2 (480p - 14 Mo | 720p - 27 Mo).
La suite : Coupe de France 2023 - Match 3.
Coupe de France 2023 - Match 1
25 juin 2023
Nous modifions la stratégie pour optimiser le nombre de points marqués avec notre robot qui bute de temps en temps pendant les déplacements (à cause des faux positifs de la balise de détection). Notre stratégie est la suivante :
- Lancer les cerises chargées
- Aspirer les cerises à côté du panier
- revenir au panier pour lancer les cerises
- déclencher le déguisement à la 97e seconde.
Nous "affrontons" RCVA qui a eu la gentillesse de ne pas vider les cerises avant que nous ne les prenions.
Le match se déroule de manière nominale pour nous...
Avec ces maigres actions nous nous classons 10e.
Match 1 (480p - 10 Mo | 720p - 20 Mo).
La suite : Coupe de France 2023 - Match 2.
Coupe de France 2023 - Homologation
6 juin 2023
En bref, ce que nous retenons de la coupe, ce sont 4 jours de défis, à la fois contre nous-même et contre le temps. Le composant qu’on pensait fiable, testé et re-testé à la coupe qui nous surprend... Nous avons adoré l’ambiance la nuit pour travailler avec la calme musique d’Eirbot. Le Restobot qui ne paye pas de mine mais qui est vraiment bon. Enfin, nous sommes fiers et heureux de l’accueil qu’a reçu notre panier.
Nous sommes partis de la maison avec un robot homologable : détection de l’adversaire fonctionnelle, estimation du score dynamique, envoi des balles dans le panier avec un taux de réussite de l’ordre de 95%, récolte des cerises complètement validé, déplacements maîtrisés. Bref ça sentait quand même bon. Notre plan, à la coupe était de changer la stratégie pour charger 10 cerises dans le robot dès le départ et les lancer dans le panier. À l’origine, ces 10 cerises étaient destinées à notre second robot (qui n’a jamais vu le jour). Ensuite, nous planifions d’aller récupérer les cerises sur les différents supports puis enfin de rajouter de quoi pousser les gâteaux avec comme objectif à demi-avoué de faire mieux que Les Karibous dans leur match nominal.
En fait, nous connaissions une faiblesse à notre robot : la balise de détection avait des faux positifs, uniquement dans certains environnements... Nous croisions les doigts pour que le soucis ne survienne pas à la coupe (! LOL ! - comme disent les jeunes).
L’homologation
Les arbitres nous homologuent sans soucis. Nous, par contre, nous observons deux défauts :
- Notre évitement a toujours des faux positifs
- La communication I2C semble s’être plantée au moment de lancer le deuxième lot de cerises.
Homologation (480p - 9 Mo | 720p - 16 Mo).
Autant nous prenons le problème d’évitement au sérieux, autant la communication I2C ne nous inquiète pas plus que cela. Ça nous ait déjà arrivé, mais vraiment de manière exceptionnelle. Est-ce qu’en l’ignorons, nous commençons une incantation pour appeler Murphy ? Allez savoir...
Nous nous concentrons sur le chargement des cerises au début du match (qui demande un petit bout de code) et la finitions de fonctions de la stratégie que nous n’utilisons pas. Nous commençons aussi nos recherches sur les VL53L1X pour obtenir les retours des autres équipes. C’est là que nous tombons sur la démonstration impressionnant de PM-Robotix qui, avec les même capteurs, n’a pas de problème de détections. En plus, ils sont capables de différentier un robot d’un autre obstacle...
Nous discutons aussi avec Projet&Tech Legacy. C’est d’eux que viendra notre solution (celle de PM-Robotix étant un chouïa complexe).
Sommes-nous confiant ? Oui, nous sommes confiants !
La suite : Coupe de France 2023 - Match 1
Poster 2023 (et un petit point d’avancement)
9 mai 2023
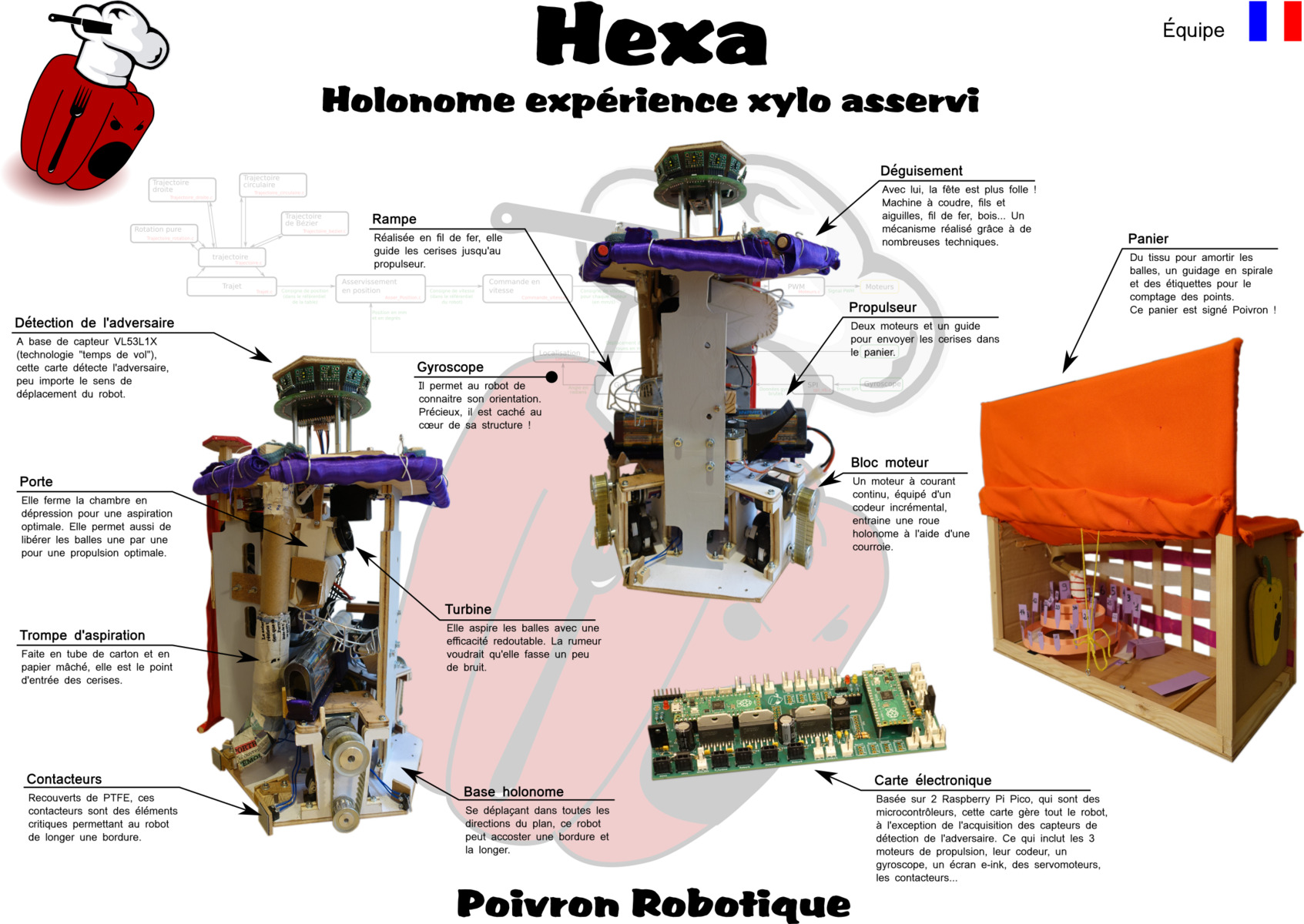
À une semaine de la coupe de France de Robotique, voici notre Poster !
Ça a été l’occasion de nommer notre robot : HEXA, pour Holonome Expérience Xylo Asservi
(Notons que Xylo, du grec, signifie bois).
Poster 2023
La compétition approche et, même si nous avons attaqué les finitions, ce sont elles qui risquent de nous occuper sur la dernière semaine.
L’état du robot est le suivant :
- Il attend la tirette pour démarrer
- Il adapte sa stratégie en fonction de sa couleur
- Il attrape des cerises, va au panier, les lances et repart en chercher d’autres.
- Il s’arrête en cas d’obstacle devant lui
- Il déclenche le déguisement à la fin du temps imparti
- Il coupe les moteurs à la fin du temps imparti
Il faut encore rajouter un mini-bout de code pour afficher le score en fonction des actions réalisées ou pas.
Le gros bout manquant est l’évitement de l’adversaire. Pour l’instant, le robot s’arrête. Nous avons bien un bout de papier quelque part avec de jolies trajectoires d’évitement mais rien n’est codé.
Avancement
- Supervision
- Mesurer la tension de la batterie et détecter une batterie faible
- Être capable de récupérer des "logs" en fin de match
- Stratégie
-
Intégrer la détection de l’adversaire dans la stratégie: fait -
Enchaîner sur la prise des cerises proches du panier: fait - Enchaîner sur la prise des cerises au milieu de la grande bordure.
- Pseudo-fonctionnel, réglages à terminer
- Stratégies d’évitement à implémenter
-
- Fiabiliser la dépose des cerises : bien avancé, mais ce sera pour un autre article
- Écran :
-
passer la liaison SPI de 100 kHz à 4 MHz comme dans l’exemple: fait
-
page précédente 1 ... 2 3 4 5 6 7 8 9 10 ... 37 page suivante
Administration du site